Sure it is a cheap stage trick, but using a lenticular lens at the right angle and in front of the right background can render what’s behind it invisible. That’s not news, but [Ian] spent some time investigating how to make the best one he could. His instructions cover how to create your own with polycarbonate, the right lens, and some optically clear adhesive. You can see some details about the shield along with some demonstrations in the video below.
The first iteration of the design worked, but it had some distracting lines and curvatures. The second version uses a large sheet of polycarbonate and liquid adhesive to attach the lens. It looks much better.
The January 16th “Green Run” test of NASA’s Space Launch System (SLS) was intended to be the final milestone before the super heavy-lift booster would be moved to Cape Canaveral ahead of its inaugural Artemis I mission in November 2021. The full duration static fire test was designed to simulate a typical launch, with the rocket’s main engines burning for approximately eight minutes at maximum power. But despite a thunderous start start, the vehicle’s onboard systems triggered an automatic abort after just 67 seconds; making it the latest in a long line of disappointments surrounding the controversial booster.
When it was proposed in 2011, the SLS seemed so simple. Rather than spending the time and money required to develop a completely new rocket, the super heavy-lift booster would be based on lightly modified versions of Space Shuttle components. All engineers had to do was attach four of the Orbiter’s RS-25 engines to the bottom of an enlarged External Tank and strap on a pair of similarly elongated Solid Rocket Boosters. In place of the complex winged Orbiter, crew and cargo would ride atop the rocket using an upper stage and capsule not unlike what was used in the Apollo program.
The SLS core stage is rolled out for testing.
There’s very little that could be called “easy” when it comes to spaceflight, but the SLS was certainly designed to take the path of least resistance. By using flight-proven components assembled in existing production facilities, NASA estimated that the first SLS could be ready for a test flight in 2016.
If everything went according to schedule, the agency expected it would be ready to send astronauts beyond low Earth orbit by the early 2020s. Just in time to meet the aspirational goals laid out by President Obama in a 2010 speech at Kennedy Space Center, including the crewed exploitation of a nearby asteroid by 2025 and a potential mission to Mars in the 2030s.
But of course, none of that ever happened. By the time SLS was expected to make its first flight in 2016, with nearly $10 billion already spent on the program, only a few structural test articles had actually been assembled. Each year NASA pushed back the date for the booster’s first shakedown flight, as the project sailed past deadlines in 2017, 2018, 2019, and 2020. After the recent engine test ended before engineers were able to collect the data necessary to ensure the vehicle could safely perform a full-duration burn, outgoing NASA Administrator Jim Bridenstine said it was too early to tell if the booster would still fly this year.
What went wrong? As commercial entities like SpaceX and Blue Origin move in leaps and bounds, NASA seems stuck in the past. How did such a comparatively simple project get so far behind schedule and over budget?
If somebody told you they recently purchased over 200 Raspberry Pis, you might think they were working on some kind of large-scale clustering project. But in this case, [James Dawson] purchased the collection of broken single-board computers with the intention of repairing them so they could be sent to developing countries for use in schools. It sounds like the logistics of that are proving to be a bit tricky, but we’re happy to report he’s at least made good progress on getting the Pis back up and running.
He secured this trove of what he believes to be customer returned Raspberries or the princely sum of £61 ($83 USD). At that price, even if only a fraction ended up being repairable, you’d still come out ahead. Granted all of these appear to be the original Model B, but that’s still a phenomenal deal in our book. Assuming of course you can find some reasonable way to triage them to sort out what’s worth keeping.
To that end, [James] came up with a Bash script that allowed him to check several hardware components including the USB, Ethernet, I2C, and GPIO. With the script on an SD card and a 3.5″ TFT plugged into the Pi’s header for output, he was able to quickly go through the box to get an idea of what sort of trouble he’d gotten himself into. He was only about half way through the process when he wrote this particular blog post, but by that point, he’d found just 40 Pis which wouldn’t start at all. He suspects these might be victims of some common issue in the power circuitry that he’ll investigate at a later date.
A metal ruler made short work of bent pins.
A nasty, but repairable, problem.
The majority of Pis he checked were suffering from nothing worse than some bent GPIO pins or broken SD card slots. Some of the more abused examples had their USB ports ripped off entirely, but were otherwise fine. Another 10 had dead Ethernet, and 4 appear to have damaged traces leading to their HDMI ports. While we’re interested in hearing if [James] can get those 40 dark Pis to fire back up, so far the results are quite promising.
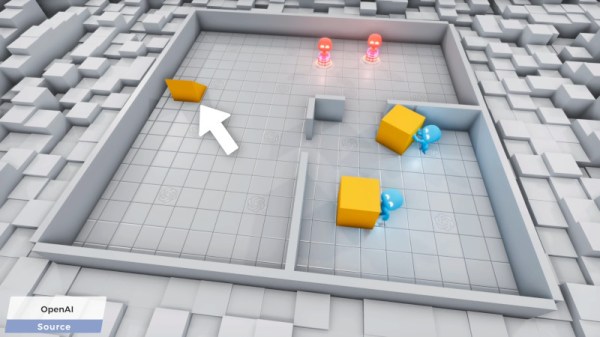
Machine learning has come a long way in the last decade, as it turned out throwing huge wads of computing power at piles of linear algebra actually turned out to make creating artificial intelligence relatively easy. OpenAI have been working in the field for a while now, and recently observed some exciting behaviour in a hide-and-seek game they built.
The game itself is simple; two teams of AI bots play a game of hide-and-seek, with the red bots being rewarded for spotting the blue ones, and the blue ones being rewarded for avoiding their gaze. Initially, nothing of note happens, but as the bots randomly run around, they slowly learn. Over millions of trials, the seekers first learn to find the hiders, while the hiders respond by building barriers to hide behind. The seekers then learn to use ramps to loft over them, while the blue bots learn to bend the game’s physics and throw them out of the playfield. It ends with the seekers learning to skate around on blocks and the hiders building tight little barriers. It’s a continual arms race of techniques between the two sides, organically developed as the bots play against each other over time.
It’s a great study, and particularly interesting to note how much longer it takes behaviours to develop when the team switches from a basic fixed scenario to an changable world with more variables. We’ve seen other interesting gaming efforts with machine learning, too – like teaching an AI to play Trackmania. Video after the break.