
It’s now about six years since Star Wars: The Force Awakens first showed us the little spherical robot BB-8, but it’s fair to say that along the way we’ve not lost our collective fascination for rolling-ball robots. There have been plenty of attempts to make a fully-rolling device, but perhaps [Derek Lieber] has a better take on it by turning a spherical robot into a two-wheeled roller by the addition of a pair of tyres. Inspired by a Samsung prototype that never made it to market, it works by the wheels working against the machine’s low centre of gravity, and using a tilt sensor to control speed.
 The ball chassis is a 3D printed shell, into which after much experimentation with motors, the final version put a pair of gimbal motors with a set of magnetic position sensors. Inside is an Arduino Mega and a custom motor driver board sporting an LM6234, with an XBee radio for remote control. Meanwhile the power comes from a set of three LiPo cells, and there is some extra lead ballast in the bottom to keep the whole thing balanced.
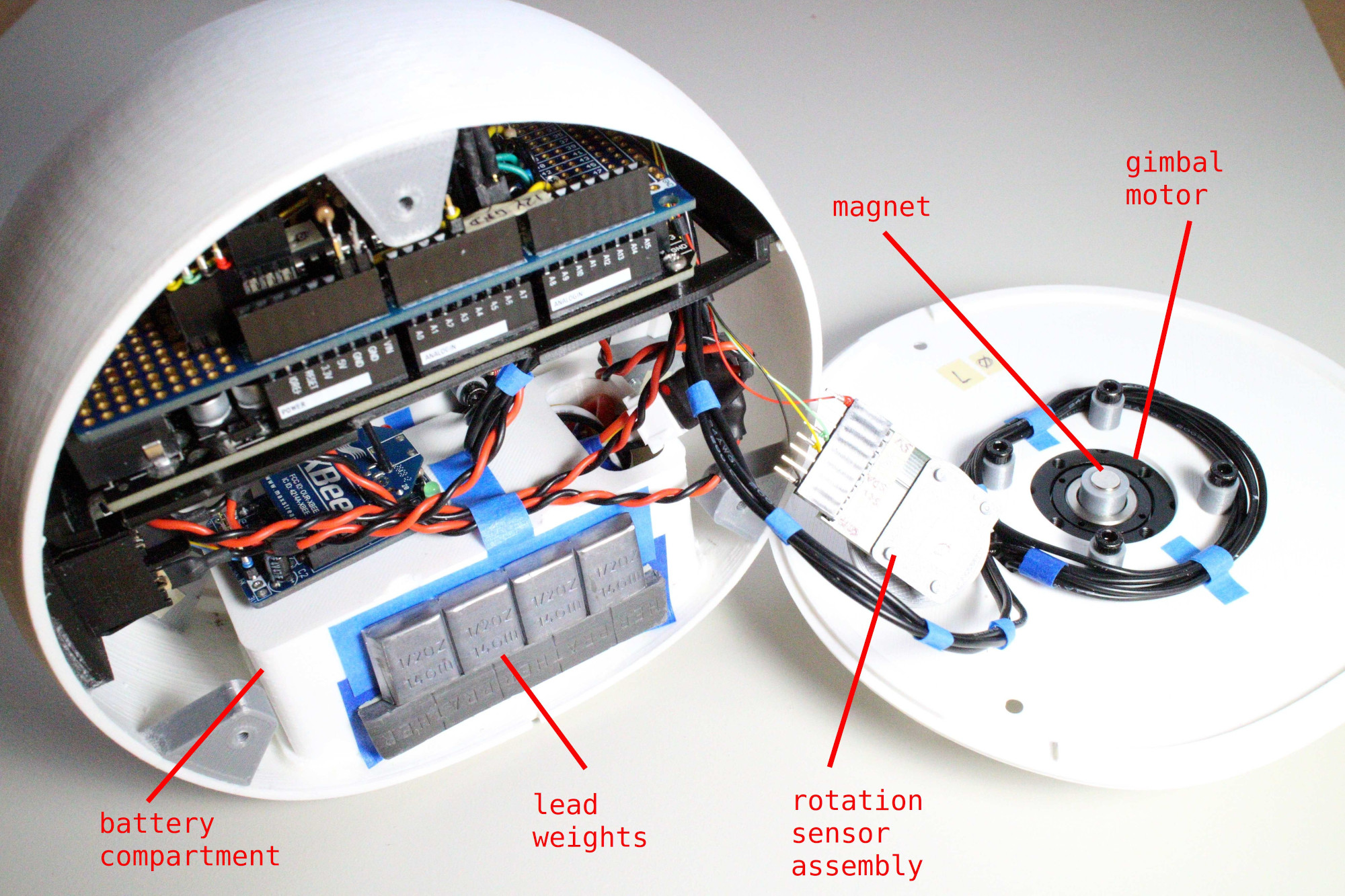
The ball chassis is a 3D printed shell, into which after much experimentation with motors, the final version put a pair of gimbal motors with a set of magnetic position sensors. Inside is an Arduino Mega and a custom motor driver board sporting an LM6234, with an XBee radio for remote control. Meanwhile the power comes from a set of three LiPo cells, and there is some extra lead ballast in the bottom to keep the whole thing balanced.
We’ve seen more conventional takes on a spherical robot in the past, but we’re particularly keen on this one, and excited to see where the future takes it.













Stairs or inclines might be a problem…….
If the lead weights he put in the bottom is enough , it can probably work for inclines :)
How much lead do you need in there to go straight up walls?
Pretty cool even if we all see issues with the design. ;)
Is that the robot making that cool banging noise? The flashing LED seems to be synched with it. If it isn’t, you should definitely consider adding that sound to the robot!
Right at the bottom of the (author’s) page, Derek explains that it’s a clock making the noise.
Nice call out to the FOC folks in his page, too.
Hey it’s One-One!
My favorite detail out of all of this was the wire wrapped pin headers for the motor position sensor. Old school! Also the Arduino isn’t using the Arduino boot loader. The whole software stack is from scratch!