[Greg06] started learning electronics the same way most of us did: buy a few kits, read a few tutorials, and try your hardest to put a few things together. Sound familiar? After a while, you noticed your skills started increasing, and your comfort level with different projects improved as well. Eventually, you try your hand at making your own custom projects and publishing your own tutorials.
Few are lucky to have a first-project as elaborate as [Greg06’s] quadruped robot. We don’t know about you, but for some of us, we were satisfied with blinking two LEDs instead of just one.
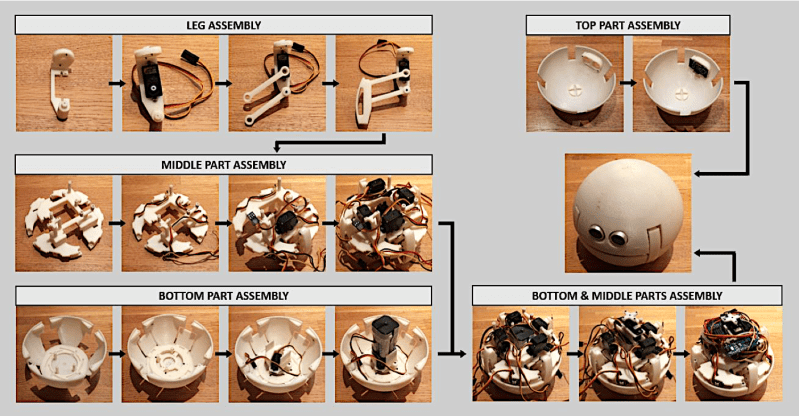
[Greg06’s] robot has a quadruped based, housed within a 3D printed spherical body. The legs are retractable and are actuated by tiny servo motors inside the body. [Greg06] even included an ultrasonic distance sensor for the obstacle avoidance mechanism. Honestly, if it weren’t for the ultrasonic distance sensor protruding from the spherical body, you might think that the entire robot was just a little Wiffle ball. This reminds us of another design we’ve seen before.
If that weren’t enough, the spherical head can rotate, widening the range of the ultrasonic distance sensor and obstacle avoidance mechanism. This is accomplished by attaching another servo motor to the head.
Pretty neat design if you ask us. Definitely one of the coolest quadrupeds we’ve seen.














I think it needs some traction. Maybe dip the ends of the feet in Plasti-Dip:
https://plastidip.com/
Insertable metal points, for traction on carpet (or surfaces you didn’t care too much about), would work too.
All i can hear is Cave Johnson talking about turrets now…
Cute. Nice clean work. Sound apparently cut out. Not hearing usual whine of SG servos. Need some beeping or tonal qualities. Not very droid without senseless beeping. Got the lights and the motion but no sound. Not likely to get ms-12016 servos. Need to list replacement micro servos. Cheapo SG/MG 90 may actually have better specs than those. Dont get higher efficiency servos in the 10$ range (yet). Getting about half hour of play time 4.8V@1800mah.? So sad. Probably also starving Nano assuming it is a 5V version. Could explain the servo jitter but maybe code or just cheapo servo. Didnt peruse code. Im assuming builder is aware that 1Amp draw (ea.) on multiple servos can cause brown out conditions given the power source. 328 so tolerant.
Dont care for the gait. Its going to drag hard on anything but flat. Have 180 to 220° on most RC servo. Use it. Most servo. There are some 90° only out there sadly. NiMH are good. Li- Ion/Po better and actually getting cheaper. On board charging be nice instead of having to disassemble or did i miss the easy access battery compartment?
Having just finished watching She-Ra, I saw this and immediately shouted “Emily!”
All we have to do is scale it up…
Needs some wireless recharging in the base, so it can waddle over to a nesting charge station and squat down on it.
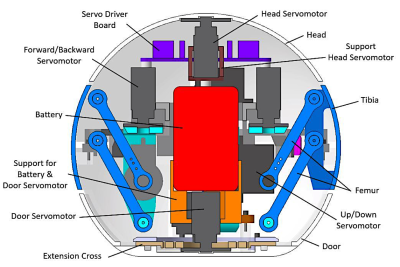
I’m not up to snot in robotics, so the drawing of the moving parts begs the question;
Do other robotiscists use anatomical names such a “femur” an “tibia” for part nomenclature?
On further thought; besides “jaws”, “eyes”, and ‘claws”?
It’s his first instructable, not his first project.