
An EDF (electric duct fan) is a motor that basically functions as a jet engine for RC aircraft. They’re built for speed, but to improve maneuverability (and because it’s super cool) [johnbecker31] designed a 3D-printable method of adjusting the EDF’s thrust on demand.
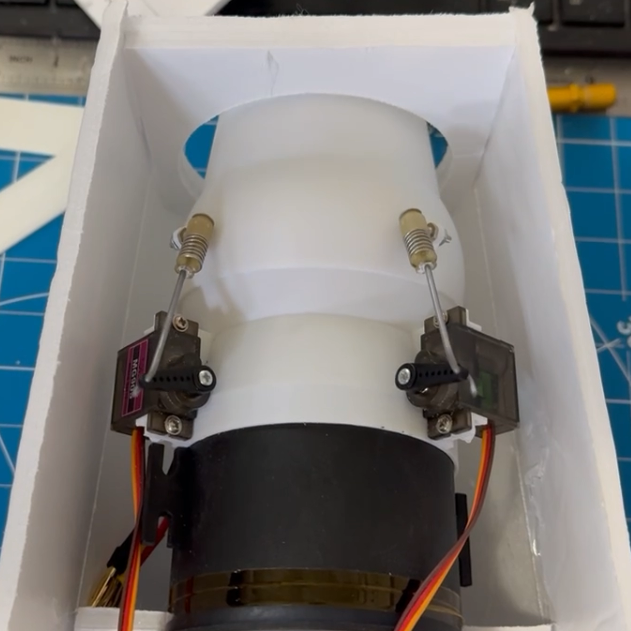
The folks at Flite Test released a video in which they built [john]’s design into a squat tester jet that adjusts thrust in sync with the aircraft’s control surfaces, as you can see in the header image above. Speaking of control surfaces, you may notice that test aircraft lacks a rudder. That function is taken over by changing the EDF’s thrust, although it still has ailerons that move in sync with the thrust system.
EDF-powered aircraft weren’t really feasible in the RC scene until modern brushless electric motors combined with the power density of lithium-ion cells changed all that. And with electronics driving so much, and technology like 3D printers making one-off hardware accessible to all, the RC scene continues to be fertile ground for all sorts of fascinating experimentation. Whether it’s slapping an afterburner on an EDF or putting an actual micro jet engine on an RC car.














Nitpick warning.
A typical quadcopter maneuvers by adjusting thrust. Here we have thrust vectoring. The term is used in both videos, so why not stick to it?
Calling this “adjusting” thrust is technically correct, I guess, but not very meaningful.
It’s like driving around a corner at a constant (scalar) speed and calling that “I’m adjusting the velocity of my car”.
Not exactly new. The Freewing Su-35 RC model had thrust vectoring 12 years ago. and simulated afterburners have been around for years too.
Hate to point this out, but, the thing on top with the number 3 upon it is a rudder
That’s a vertical stabilizer. The rudder is the control surface which is typically fixed to the vertical stabilizer.
It doesn’t move which makes it just a vertical stabilizer.
@ Andrzej, the two terms mean different things. In a quad copter the direction of the thrust doesn’t change, just the amount. In thrust vectoring you’re changing the direction of the thrust without necessarily changing the amount. You could add thrust vectoring to a quad copter by adding additional servos to rotate the motor but I’m not sure the performance gain would be worth the extra weight.
A cool thing about this particular design is that the thrust vectoring allows it to eliminate the rudder (as mentioned above) & the elevator. None is seen, even in canard configuration. That is something not seen in any production aircraft. Could be that some of them are simple stabilizers but the fact remains that this particular design omits them.
Not sure I like lack of control in case of an engine failure (thrust, rudder & elevator) but I suppose ducked fans are reliable enough that the risk is minimal… and it’s RC after all.
At the end of the day, it’s cool and I want one.