The internet has already taught us that an electric surfboard is a great way to get around on the water while looking like an absolute badass. [RCLifeOn] is continuing to push the boat forward in this regard, however, adding thrust vectoring technology to his already-impressive build.
 If you’re unfamiliar with the world of electric surfboards, the concept is relatively simple. Stick one or more electric ducted fan thrusters on the back, add some speed controllers, and power everything from a chunky bank of lithium-ion batteries. Throw in a wireless hand controller, and you’ve got one heck of a personal watercraft.
If you’re unfamiliar with the world of electric surfboards, the concept is relatively simple. Stick one or more electric ducted fan thrusters on the back, add some speed controllers, and power everything from a chunky bank of lithium-ion batteries. Throw in a wireless hand controller, and you’ve got one heck of a personal watercraft.
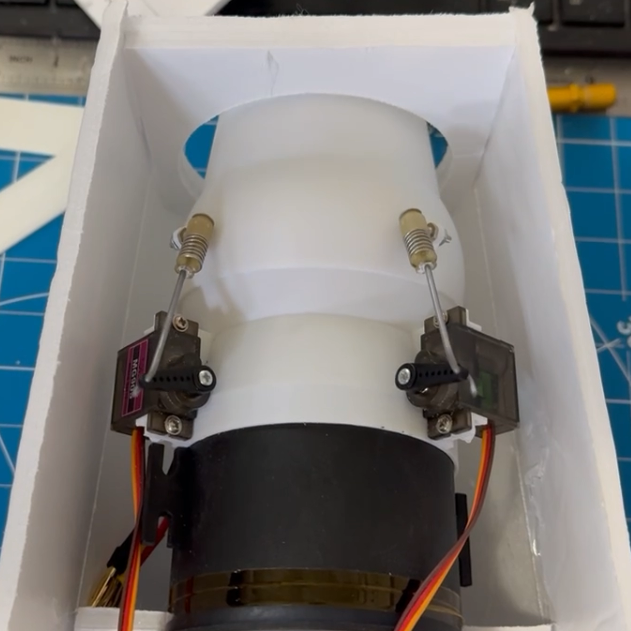
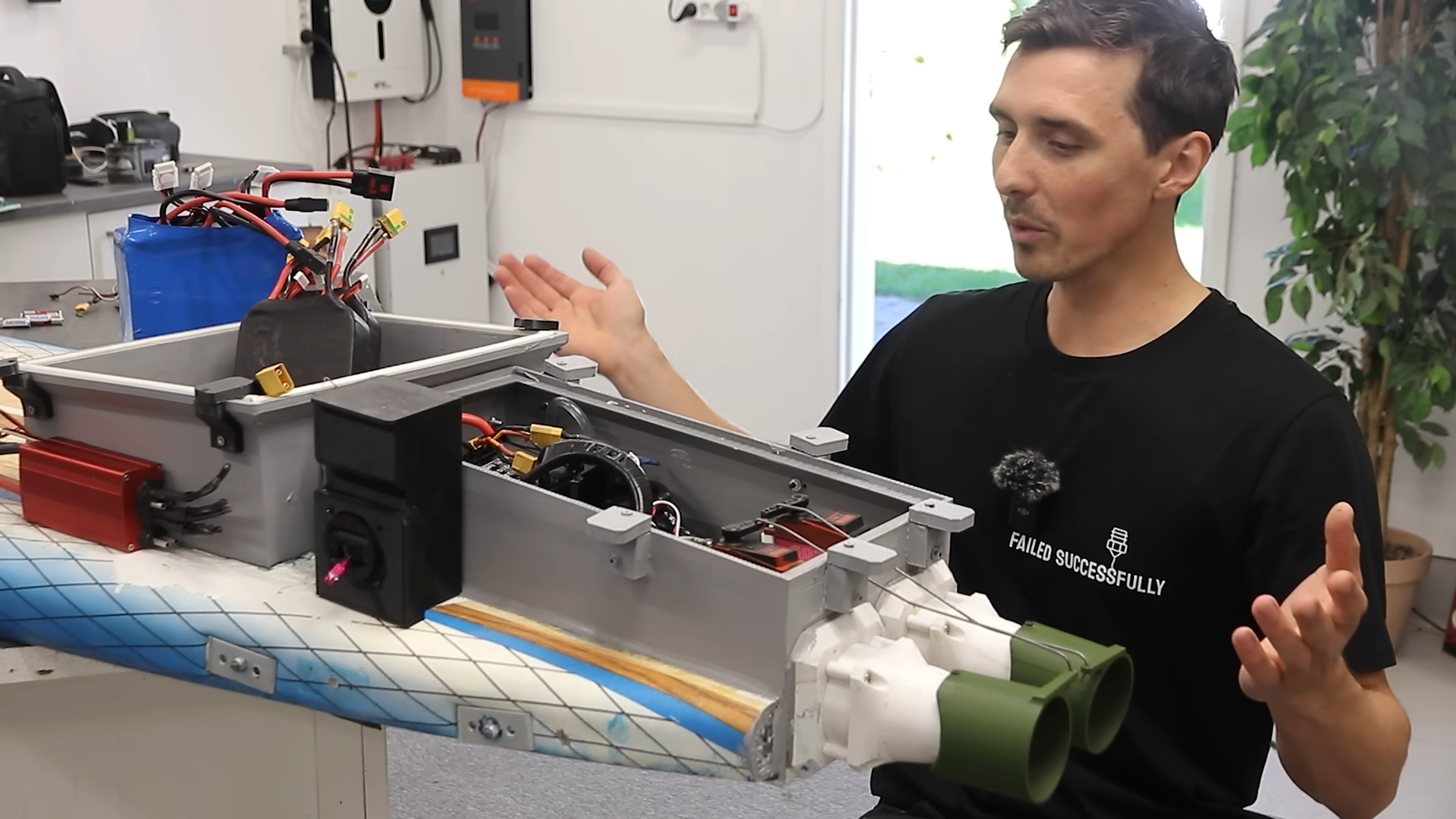
Traditionally, these craft are steered simply by leaning and twisting as a surfer would with a traditional board. However, more dynamic control is possible if you add a way to aim the thrust coming from the propulsion system. [RCLifeOn] achieved this by adding steerable nozzles behind the ducted fan thrusters, controlled with big hobby servos to handle the forces involved. The result is a more controllable electric surfboard that can seriously carve through the turns. Plus, it’s now effectively an RC boat all on its own, as it no longer needs a rider on board to steer.
We’ve covered various developments in this surfboard’s history before, too. Video after the break. Continue reading “Electric Surfboard Gets Thrust Vectoring Upgrade”