Remote-controlled cars can get incredibly fast and complex (and expensive) the farther into the hobby you get. So much so that a lot of things that are missing from the experience of driving a real car start to make a meaningful impact. [Indeterminate Design] has a few cars like this which are so fast that it becomes difficult to react to their behavior fast enough through sight alone. To help solve this problem and bridge the gap between the experience of driving a real car and an RC one, he’s added force feedback steering to the car’s remote control.
The first thing to tackle is the data throughput required to get a system like this working wirelessly. Relying heavily on the two cores in each of a pair of ESP32s, along with a long-range, high-speed wireless communications protocol called ESP-NOW, enough data from the car can be sent to make this possible but it does rely on precise timing to avoid jitter in the steering wheel. Some filtering is required as well, but with the small size of everything in this build it’s also a challenge not to filter out all of the important high-frequency forces. With the code written, [Indeterminate Design] turned to the 3D printer to build the prototype controller with built-in motors to provide the haptic feedback.
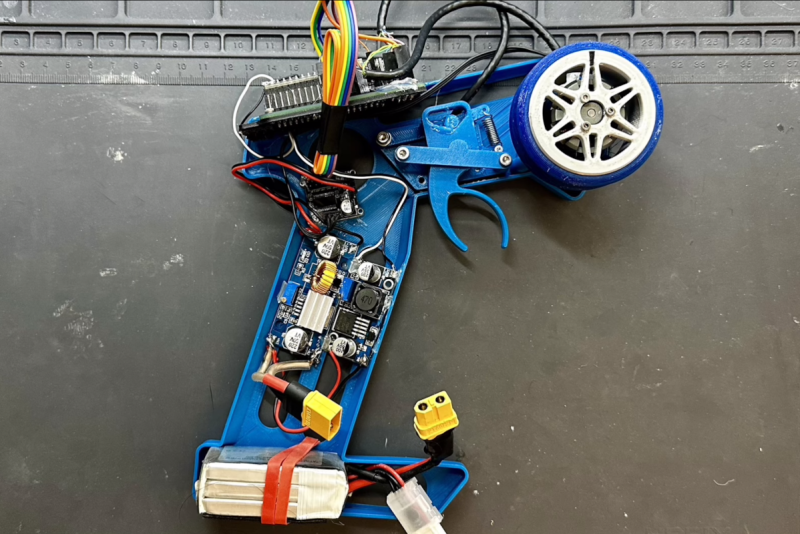
The other half of the project involves sensing the forces in the RC car which will then get sent back to the remote. After experimenting with a mathematical model to avoid having to source expensive parts and finding himself at a deadend with that method, eventually a bi-directional load cell was placed inside the steering mechanism which solved this problem. With all of these pieces working together, [Indeterminate Design] has a working force feedback steering mechanism which allows him to feel bumps, understeer, and other sensations, especially while doing things like drifting or driving through grass, that would be otherwise unavailable to drivers of RC cars. The only thing we could think of to bring this even more into realistic simulation territory would be to add something like a first-person view like high-speed drones often have.














Cool.
In my brief foray into the realm, I found myself to be practically worthless at racing an RC car. I just constantly overreacted. This might have made me passable as a driver (well, actually, based on my finish positions I guess I already was very passable as a driver…).
I wonder if it would be possible to sense an error output from the steering servo to detect and measure the external deflection forces acting on the steering system.
It might not even be possible to surface the error value in a hobby servo. It could be that the forces aren’t enough to try to backdrive the servo enough to create an error. His setup with the relatively giant load cell could be a lot more sensitive.
Maybe there’s a MEMS force sensor that’s less massive and voluminous.
My first thought while reading the article was to use steering servo current to determine the force. That doesn’t give force direction though
The feedback there might be garbage regardless.
The steering geometry makes a huge difference in that feedback, and something tells me that R/C cars that don’t come with force feedback, don’t have steering systems designed to provide that feedback.
I agree, I don’t think RC car suspensions are designed for the force feedback. I actually felt like the forces through the steering were quite low (Maybe made to save servos and handle jumps). Lots more testing to play with.
I tested measuring the servo current, and it’s finicky. For example, the servo I’m using now, only senses a minimum of ~80g one direction and ~130g the other. The load cell is accurate to ~5g. A better servo might be more consistent and respond to smaller deviations. shrug
You can just glue a strain gauge onto whatever you want to measure the force on. They are tiny things. The measured strain of the part you glued it onto will be correlated with a force.
I looked into this a bit. I need more testing, right now I’m not positive how accurate I need the force sensor to be. Would a strain gauge on a tierod be accurate enough? Can I sense both tension and compression?
Its driving me crazy but I’m sure there was an articale here on hackaday a year or so ago where someone built strain gauges similar to these, and I thought yes they would be cool for RC car FFB with a 2 way telemetry system, but no time to do it (and maybe not enough knowledge) to do it myself.
https://www.youtube.com/watch?v=LoqGDTH75jY