
[kernsy] sent in this nice little PICAXE based hack to provide computer control of a VExpolorer kit robot. The PICAXE takes serial commands and outputs the pulse commands normally generated by the controls directly to the RF chipset in the remote.
Robots Hacks2467 Articles
Another High Altitude Project
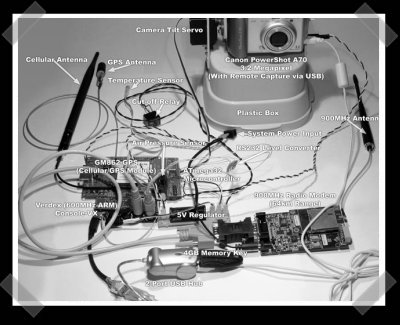
[Jock] sent in HALO, a nice diy high altitude recon project. Taking a page from the Kite Arial Photography guys, they mounted the camera on a servo tilt mechanism, had radio modem control and SMS gps position updates. I’m waiting for someone to put together a similar package that glides back to home base after the balloon is released.
By the way, if you’ve got a newer CRT RPTV, you might be interested how I fixed mine.
Bowling, Industrial Robot Style

If you like things like coil gun armed robosapiens, then you’ll thank [Aaron] for sharing his teams quest for the ultimate in stupid robot tricks. They hauled a 2800 pound industrial robot to the desert and used it to toss bowling balls… at an innocent RV. To top things off, they even lit one on fire. He even had to call the manufacturer up and sweet talk them into telling him how to speed up the robot so they could throw the balls even harder. The fire I can understand, but I’ve got no explanation for the roman gladiator or the bunny suit. Videos embedded after the break.
24C3 Build Your Own UAV
The 24th annual Chaos Communications Congress in Berlin is already off to a great start. The first talk we attended was [Antoine Drouin] and [Martin Müller] presenting Paparazzi – The Free Autopilot. Paparazzi is an open source hardware and software project for building autonomous unmanned aerial vehicles. The main hardware board has an ARM processor and GPS. It uses inertial and infrared sensors to determine orientation and altitude. The four infrared thermopiles measure the air temperature. The ground is warmer than the sky and if you compare the temperature in the direction of each wing tip your can tell what angle the airplane is at. It’s really that simple.
They did a pretty amazing live demo. Using the network connection they controlled a UAV flying in France and another in Germany. Both planes were streaming live video from belly mounted cameras. One relaying through a home DSL connection and the other through a UMTS cellphone. They were able to change way-points on the fly and issue flight pattern commands. There is a ground crew at each location with a security pilot that will switch the controls to manual if things get out of hand.
Talcum Powder Print Bot

It’s been a while since we’ve seen a new print bot idea. [Kyle] sent in his groups final project at Georgia Tech. An ever so handy iRobot chassis, a dot matrix printer carriage and motorized drill bit in a funnel strategically dispenses talcum powder to print messages or images on the floor. Just think, one robot can write all over the floor and the other one can clean up afterward. How long until some sports geeks build a bigger one to deface a football before a big game?
Python Web Based Serial Control
 [Benjamin] sent in his efforts to use Python to provide a web interface for his Aurdino. Python is usually pretty easy to manipulate, so it might be just the thing for someone looking to add a web control to a project with an open serial interface.
[Benjamin] sent in his efforts to use Python to provide a web interface for his Aurdino. Python is usually pretty easy to manipulate, so it might be just the thing for someone looking to add a web control to a project with an open serial interface.
If you’ve got a hack you want to share, use the tips line.
Roboexotica Highlights

After the break are some of our favorite bits of machinery from Roboexotica so far.









