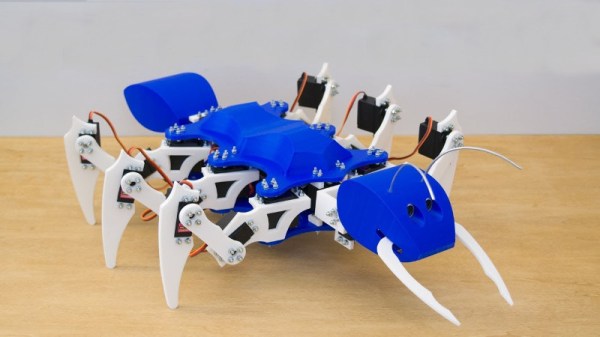
Walking robots come in many forms, and each presents their own unique challenges. Bipedal style locomotion is considered particularly difficult to do well, however designs with more legs offer certain advantages. Hexapods offer the possibility of keeping several legs on the ground while others move, providing a useful degree of stability. [How To Mechatronics] developed this ant robot, which is an excellent example of the form.
The hexapod has as the name suggests, six legs, each of which consist of 3 joints. This necessitates 3 servos per leg, for 18 servos total just for locomotion. Further servos are then used to control the abdomen, head, and mandibles. This gives the robot strong ant credentials, above and beyond being simply a 3D printed lookalike.
Brains come courtesy of an Arduino Mega, chosen for its ability to control a large number of servos. A custom PCB is printed as a shield to ease the connection of all the necessary hardware. An HC-05 Bluetooth module is used for communication with an Android app, which controls the ant. The piece de resistance is the ultrasonic sensors in the head, which allow the ant to automatically defend itself against predators that get too close.
It’s an involved build, requiring plenty of 3D printing and over 200 fasteners. Fundamentally though, it’s a fully working and tested hexapod build with full plans available for download, ready to toil in your underground sugar caves.
If your hexapod tastes skew more anime than insectoid, check out this Ghost in the Shell build. Video after the break.
[Thanks to Baldpower for the tip!]
Continue reading “Welcome Our New Insect Overlords With Arduino-Powered Ant Bot”








