When the subject of CVTs or continuously variable transmissions comes up, the chances are that most readers will think of the various motor vehicles they’ve appeared in. Whether it’s a DAF, a Ford, a FIAT, or a Chevrolet, most major manufacturers have tried one at some point or another with greater or lesser success. The automotive ones inevitably use a variation on a V-belt or metal band between variable separation conical pulleys, but this is by no means the only CVT configuration. Serial tinkerer [Robert Murray-Smith] takes an in-depth look at the subject as part of his ongoing fascination with wind turbines.
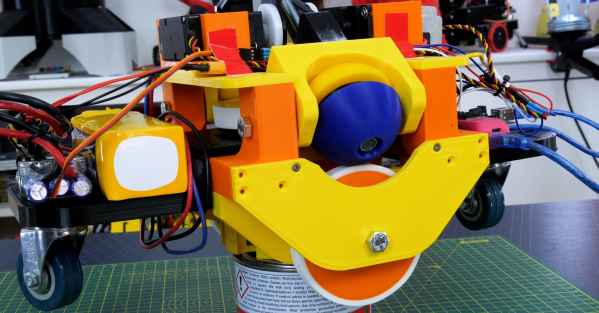
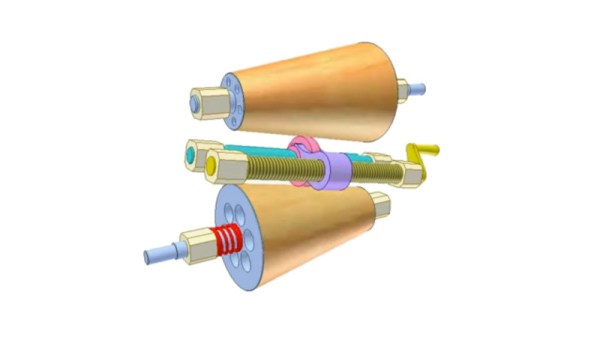
What caught our eye about this video isn’t so much the final 3D-printed design he selects for his experiments, but the history and his look at the different CVT designs which have appeared over the years. We see the V-belts, as well as the various cone configurations, the disk transmissions, the hydrostatic ones, and even magnetic versions. His transmission uses two cones with a rubber coating, with of all things a movable golf ball between them. We’re guessing it will appear somewhere in his future videos, so watch out for it.
Meanwhile, this isn’t the first time we’ve seen a CVT, [James Bruton] used a hemisphere to make one on a robot.