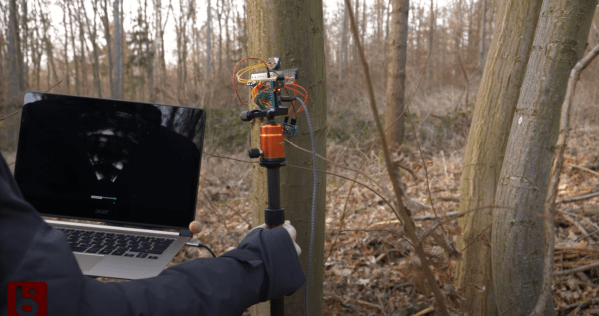
When [Electron Impressions] used a powerful ultrasonic array to project a narrow beam of sound toward a target, he described it as potentially useful in getting someone’s attention from across a crowded room without disturbing other people. This is quite a courteous use compared to some of the ideas that occur to us, and particularly compared to the crowd-control applications that various militaries and police departments put directional speakers to.
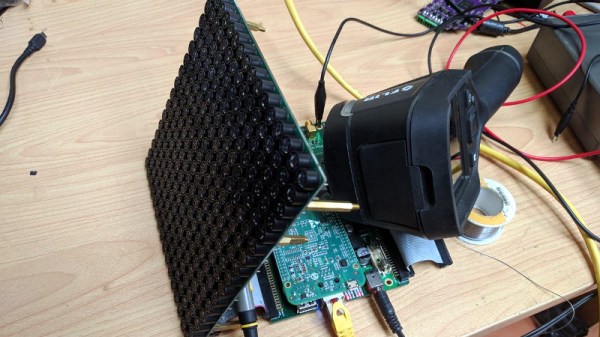
Regardless of how one uses it, however, the physics behind such directional speakers is interesting. Normal speakers tend to disperse their sound widely because the size of the diaphragm is small compared to the wavelength of the sound they produce; just like light waves passing through a pinhole or thin slit, the sound waves diffract outwards in all directions from their source. Audible frequencies have wavelengths too long to make a handheld directional speaker, but ultrasonic waves are short enough to work well; [Electron Impressions] used 40 kHz, which has a wavelength of just eight millimeters. To make the output even more directional, he used an array of evenly-spaced parallel emitters, which interfere constructively to the front and destructively to the sides. Continue reading “Accurately Aiming Audio With An Ultrasonic Array”