Phased-array radars are great for all sorts of things, whether you’re doing advanced radio research or piloting a fifth-generation combat aircraft. They’re also typically very expensive. [Nawfal] hopes to make the technology more affordable with an open-source radar design of their own.
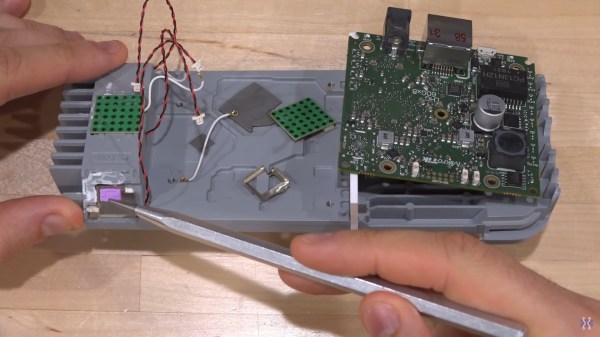
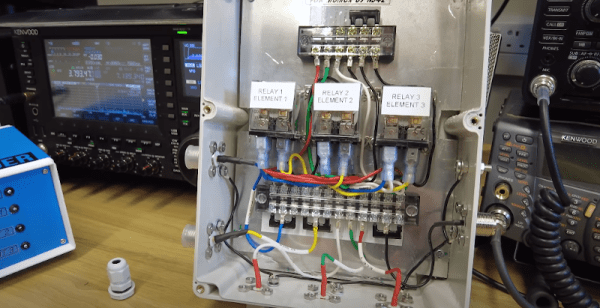
The design is called the AERIS-10, and is available in two versions. Operating at 10.5 GHz, it can be built to operate at ranges between 3 or 20 kilometers depending on the desired spec. The former uses an 8 x 16 patch antenna array, while the latter extends this to a 32 x 16 array. Either way, each design is capable of fully-electronic beam steering in azimuth and can be hacked to enable elevation too—one of the most attractive features of phased array radars. The hardware is based around an STM32 microcontroller, an FPGA, and a bunch of specialist clock generators, frequency synthesizers, phase shifters, and ADCs to do all the heavy lifting involved in radar.
Radar is something you probably don’t spend a lot of time thinking about unless you’re involved in maritime, air defence, or weather fields. All of which seem to be very much in the news lately! Still, we feature a good few projects on the topic around these parts. If you’ve got your own radar hacks brewing up in the lab, don’t hesitate to let us know.