Satellites make many of our everyday activities possible, and the technology continues to improve by leaps and bounds. A prototype, recently completed by [Arda Tüysüz]’s team at ETH Zürich’s Power Electronics Systems Lab in collaboration with its Celeroton spinoff, aims to improve satellite attitude positioning with a high speed, magnetically levitated motor.
Beginning as a doctoral thesis work led by [Tüysüz], the motor builds on existing technologies, but has been arranged into a new application — with great effect. Currently, the maneuvering motors on board satellites are operated at a low rpm to reduce wear, must be sealed in a low-nitrogen environment to prevent rusting of the components, and the microvibrations induced by the ball-bearings in the motors reduces the positioning accuracy. With one felling swoop, this new prototype motor overcomes all of those problems.
 The primary draw is its frictionless motor — made possible by a magnetic field that keeps the rotor afloat. This allows the motor to operate at a staggering 150,000 RPM — twenty times faster than those in current use — and in a vacuum, since there is no wearing of the parts to account for. This also eliminates those pesky microvibrations — improving satellite attitude accuracy. All these benefits are enclosed in a small package that has potential applications in satellites as small as shoeboxes. Is the motor scale-able for use in commercial and research satellites? Considering the interest shown by the European Space Agency in this project, we think so.
The primary draw is its frictionless motor — made possible by a magnetic field that keeps the rotor afloat. This allows the motor to operate at a staggering 150,000 RPM — twenty times faster than those in current use — and in a vacuum, since there is no wearing of the parts to account for. This also eliminates those pesky microvibrations — improving satellite attitude accuracy. All these benefits are enclosed in a small package that has potential applications in satellites as small as shoeboxes. Is the motor scale-able for use in commercial and research satellites? Considering the interest shown by the European Space Agency in this project, we think so.
Now, this isn’t a traditional ‘hack’, but ingenuity that can improve quality of life is in keeping with the hacker spirit, while also offering the potential for advanced capacity for CubeSats and similar space-faring operations.















I was going to complain that this has been around for decades, but…
“In collaboration with the ETH spin-off Celeroton, Tüysüz and colleagues have developed a new kind of magnetically levitated reaction wheel motor that reaches speeds of more than 150,000 revolutions per minute.”
That is amazingly fast! And it is markedly more compact than what most satellites currently implement. I hope we get another ‘Kepler’ out of this. :)
Does anyone know of any homemade 3 axis magnetically levitating devices? I have some crazy ideas for ‘spherebots’ and am stuck at the design phase. I don’t want to use a gimbal system for the final version.
Clarification: “3 axis magnetically levitating device”-like a sphere within a sphere, repelling each other with electromagnets. In my idea the spheres are touching when the power is off or it isn’t moving.
The insane speed is probably the reason it’s so small…
No it seems the idea is to make it small through insane speeds. It’s deliberate.
And incidentally it can go even more extreme, and I quote:
” the use of Lorentz-type magnetic bearings is shown to have very high dynamics due to its slotless structure, and to enable very high (500 000 r/min) rotational speeds owing to low rotor losses”
https://en.wikipedia.org/wiki/Corrosion_in_space
That was a very interesting read, thanks.
Seconded. I had no idea you’d have to worry about oxidation.
The drawback of magnetic bearings is that they’re not very rigid, so you get torque oscillations much like if the reaction wheel was connected to the satellite with loose springs.
And in space there’s nothing to dampen those oscillations down because it’s operating under a vacuum, so keeping the satellite pointing steady is not going to be easy either way.
Third paragraph…
And the linked article mentions that a conventional system using ball bearings performs much worse in the vibration department.
Yes, in the vibration department – it’s a different phenomenon than what I was talking about.
The rotor is loosely coupled to the housing through the magnetic bearing – the two can move about each other so that when the satellite turns the rotor doesn’t – and vice versa. Not quite as much. The magnetic field that bears the force between the two yields much more than a ball bearing rolling in a metal track, so the reaction wheel becomes “mushy” – it starts to have some play in it as if the two were connected by a spring.
That being the case, whenever you cause the reaction wheel to accelerate, you also induce a compression in the “spring” between the rotor and the housing that you have to mind when turning the satellite or else it will start to oscillate, since there’s no damping in the magnetic bearing under vacuum.
Isn’t it possible to accelerate the wheel using 2 tangent forces? As long as they are in opposite directions and on opposite sides, shouldn’t they cancel out to a pure torque around the axle without any compression on the bearing?
You can’t avoid having forces that act against the rotor trying to turn it end-to-end as the satellite around it moves.
There are more than one reaction wheel in a satellite.
Alright I see what you mean now. I doubt they will give us enough details to truly examine the design.
If you want to understand the point, take two pieces of metal and push them against each other. Stops kinda suddenly doesn’t it?
Then take two neodymium magnets and push them together NN or SS. You get quite a lot of spring in it. That’s also the case with the rotor in the magnetic bearing. A regular bearing will chatter about and create the sort of microvibrations by rattling about, but it will keep the shaft straight to within the tolerances of the bearing, whereas a magnetic bearing won’t rattle, but will be looser and have more spring to it.
It would take a truly tremendous magnetic field strength to match the rigidity of a ball bearing.
polymagnets might provide the required local field strength to mitigate some of the effect.
I just don’t understand why a controlled electromagnet configuration wouldn’t be a solution. “Spring”…Oscillation…that really sounds like a control loop (Hall sensors- µC- electromagnets-…) is necessary in my humble opinion.
“a controlled electromagnet configuration”
Sure, if you have the power to do it.
Either tremendous power OR a very close vicinity,
And of course the rotation causes a gyroscopic effect that fights deviation from its position. (That’s the whole point of the device in the first place.), so as long as the housing doesn’t vibrate you should be covered for a large part right?
Insane field strengths & passive stabilization geometries were developed years ago for Flywheel Energy Storage.
Look at the info they’re provided, the limiting factor here is the titanium rotor and they’re not even bothering to use passive stabilization.
This is basically just a tiny FES (less than 5kj) which happens to be a kickass reaction wheel gyro.
Could closed loop control of the oscillation by means of placing two coils perpendicular to one another work?
You would need more than 2 coils (and large appropriately focused ones too), ie consider the moment of oscillation is around a vertex furthest from the perpendicular intersection of both of those 2 coils – having 3 would be an absolute minimum at 120 degrees & might be useful depending but only to a limited degree – its a trade off…
In any case as Dax mentioned you need suitable power (to even start to moderate variance), even if you had a massive amount of power you still cannot actually stop any rotor to stator contact via (electro)magnetics though you can (critically/over) dampen oscillation to a fair degree depending on its frequency (F) & rate of change of F (such as if you also want to accelerate the motor for a maneuver set).
See Critical Damping within this link (but read the prelim first, not straightforward unless “in the business” as an engineer):-
https://en.wikipedia.org/wiki/Damping
Design/proof of concept would be subject to an immense amount of combinatorial testing as there are several potential modes of oscillation (Eg adding an axial vector too !) and you would have to be sure any residual coil effects you have introduced don’t affect normal operation within a tolerable variance – not to mention potential coupling effects. There is also
the extra power consumption, the supplies, the weight, the reliability MTBF as it all factors into launch costs &
confidence of operation over the anticipated system life time…
You still have the problem of V=Ldi/dt re current flow *both* ways, please see my post of 1st post of July 30, 2016
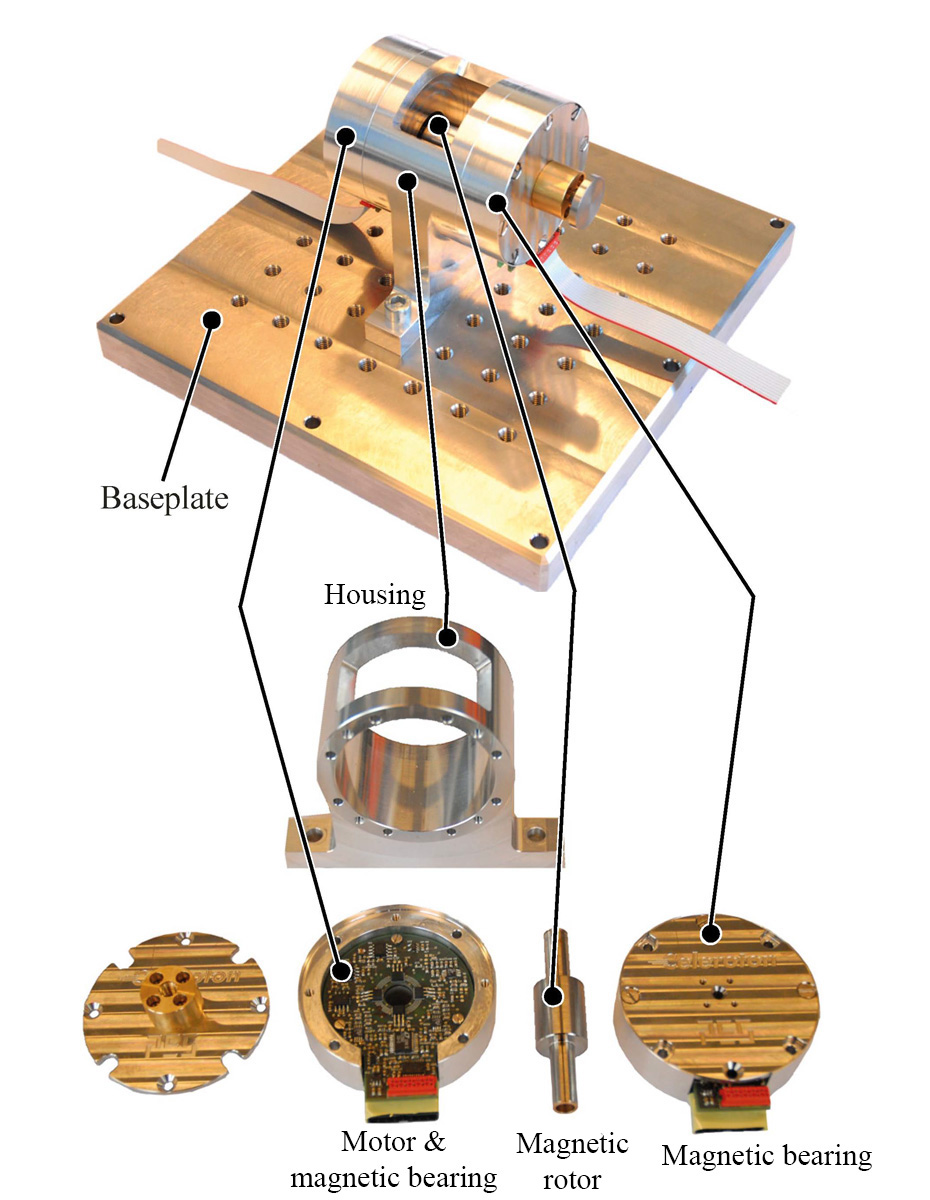
There is quite a bit of electronics packed into that motor. I wonder if some of it is to provide active cancellation of those oscillations by manipulating the magnetic field.
https://www.pes.ee.ethz.ch/uploads/tx_ethpublications/14_High_Speed_Magnetically_Levitated_Reaction_SPEEDAM_Tueysuez.pdf
Fig. 11 – displacement less than 20 micrometers at 90 krpm. I’d call that not bad at all and definitely something the authors would’ve been considering given the objectives of the project (spin a mass really freakin’ fast).
You likely wouldn’t achieve the same RPM but a SSO bearing (self-stabilizing oil-pressure bearing) that Noctua (high end PC fan maker) is famous for using could solve these issues. I don’t know what the max RPM of a bearing like that is but it would still likely be fast enough to do what it needs to do but still increase accuracy.
liquids in space are not a very good idea.
Laser Ring Gyros have zero moving parts, and are already available, and in use on commercial spacecraft. I don’t see the market for this motor in attitude control applications.
These are reaction wheels, not gyroscopes. Their point is that when you accelerate a spinning mass, the satellite experiences an equal and opposite force and spins in the opposite direction. A laser ring gyro does not physically rotate the satellite.
150,000 RPM. Not a decimal error. Yowza.
Lol, I double-checked that as well.
There’s fast, and then there’s space-fast.
It’s not that fast. Dyson cordless vacuum cleaners come with motors that spin to 120,000 rpm.
This is 30,000 rpms faster than the Dyson then. Fast to me!
Point being that the dyson motor would easily turn 150krpm if it wasn’t also pumping air at the same time.
indeed – what is the MTBF?
The thing that limits the running speed of motors is not the fact that they’re operating under atmospheric conditions, but centrifugal forces that tend to make things explode.
Only tiny motors can turn above 100,000 RPM, because the forces increase in the cube of the rotor diameter. Above a certain size and speed, there’s no material known to man that won’t get ripped asunder.
in the square of the rotor diameter, sorry
The MGU-H on modern F1 cars are about the size of a soda can, and are capped at 125k RPM.
And that is while switching between motor and generator operation.
Wow a soda can, that’s huge! You can barely fit one in most pockets!
and their projected life time is couple hundred hours … there was a nice tech tutorial in Turbo molecular pump hackaday project about the tensile strengths of materials vs. tangential speed.
Another great application for a tiny frictionless motor would be to make one of these:
https://en.wikipedia.org/wiki/Compensated_pulsed_alternator
You just put another idea into several people’s project list. :)
Railgun power supply…
Been there for a while, just not as small:
https://en.m.wikipedia.org/wiki/Flywheel_energy_storage
A compulsator is slightly different from ‘normal’ flywheel storage. The output stage is optimized for much higher power delivery.
Thanks to Dax for the link for the Compulsator link, reminds me of the early KERS in Formula 1..
The pdf links at end are broken but, I’m sure they can be found if need be, I have old copies which I
can put up on a friends web-area if anyone has difficulty getting them through conventional search engines.
I read recently that Adgero had installed 5 off 50F 160V graphene super caps for a truck, that’s a
whopping 3.3MJoules of available short term capacity with an estimate million charge/discharge cycles,
some general info here:-
http://adgero.eu/adgero-and-skeleton-technologies-unveil-kers-system-for-road-haulage/
Bit more here:-
http://www.gizmag.com/adgero-ultracapacitor-trailer-kers/42991/
Thanks to Yates for the corrosion in space link. It does seem odd that the ISS & space shuttles had
to deal with oxygen as their prime corrosion cause. Atomic oxygen almost like ozone, quite nasty stuff
when there’s no moderator – so don’t panic as terrestrial room ionisers should be fine ;-)
If those microwave drives []<| are developed further attitude and station keeping will just be a question of energy consumption.
Good lord, are you that dumb or are you joking?
Conditional statements can be recognised by various structures such as an “if” clause. Idiots can be detected by their failure to parse such structures.
The problem is “what microwave drives?”
Are you referring to the Em-drive hoax? Then it’s back to the previous commenter.
You have a NASA hoax theory to share?
The NASA tests showed that the null test – the configuration that wasnt supposed to produce any thrusts by the hypothesis of it – did – which means the results are an artifact of the test setup and no actual effect was observed.
which means the results are an artifact of the test setup and no actual effect was observed.”
No it means the theory of operation is wrong, if there is an ‘artifact’ of thrust you got thrust.
The null test was badly named and has cause a lot of confusion. It was still an EM drive and it still produced thrust, but it was not slotted. According to one of the theories of operation the slots were important so that particular theory was invalidated. There is still an anomalous thrust generation far larger than can be explained through radiation pressure alone, which is very exciting.
Note there was an actual dummy RF load used to test the rig and that produced no thrust as expected.
@Marcus:
No. The NASA test and a test carried out by labs in Germany specifically said the EM Drive produced nothing recognizable as purposeful thrust.
Specifically, NASA said that any thrust the device did produce was so minute that it barely registered about the minor thrust caused by the heating of the microwave inside the EM drive.
So, no, the EM drive is a null right now, its mostly a hoax because it keeps getting brought up on ‘popular science’ websites as some sort of godsend, when its mostly just an unproven and currently unworkable device.
Geez man, I’m supposed to be the one that doesn’t get jokes!
Nah, you’ve graduated from that.
Tinker Duck says:
“I just don’t understand why a controlled electromagnet configuration wouldn’t be a solution.”
Current to increase the magnetic field to a level it acts like two bearings *stopped* against
each other approaches impractical values & the more quickly you want to achieve that
the power approaches infinity for minuscule delay , see the comment by Dax.
ie
Without some physical medium to stop the rotor & stator coming into contact & especially so
in a dynamic control loop environment you have to deal with very high delta I & time delay as any
inductor/electromagnetic suffers V=Ldi/dt so where are you going to get that much power (at very
short delay surge currents) to push a massive current & over a very short period *and* deal with
much power returned when you remove the current which consequently produces massively high V ?
The design constraints would suggest the rotor acceleration (& jerk) is the best way to accomplish
that, a safe fall back position is some tolerable manageable (minimum) contact of rotor to stator,
maybe some graphene layers (with high end teflon backing) which have lowest friction but extremely
hard so wont wear along with some means to grab any particles that come away on those rare events of contact.
In early hard drive days, they used sticky materials (which also doubled as conformal coatings for
electronics) near the tangents of the head to platter to grab any (micro) bits – would work quite well in a
vacuum for this motor to incrementally capture parts as long as they are not ferro-magnetic…
This high end design has lots of permutations re intersecting material properties for the objectives desired
& is an interestingly challenging intellectual exercise. Its great to see people keen to do that who are also
well funded to progress in the rarefied atmosphere of the space sciences ;-)
Thanks for bringing this to our attention, I’m more frequently likely to rotate my efforts to inducing greater
understanding of my capacity to learn from these issues with far less resistance too…
Hi newbie!
Adam says:
“I don’t know what the max RPM of a bearing like that is but it would still likely be fast enough to do what it needs to do but still increase accuracy”
In a fully terrestrial environment that might be worth considering & even then with an upper MTBF/MTTR aspect to consider
given the overall costs of reliance on that key component can be moderated by a site visit to repair. Imnsho; Any rotor to stator contact via seal & oil is still far more than mere air if the magnetic bearing was employed
Extra-terrestrial is totally another matter. Any lubricating fluid cannot be fully contained 100% within any seal when the motor operates in vacuum conditions. Consider, a looser seal will allow oil to escape more quickly & a tight seal less oil loss would limit speed & increase power consumption by increasing rotor drag thus affecting MTBF of any connected electronics from drive electronics to power supply and consequent need for larger solar panels to supply that power which means larger areas thus more risk of damage Eg micrometeorites etc
The issue in vacuum is oil will evaporate (albeit comparatively slowly), even at low temperatures although rate is low. So you have to consider what happens to that oil; how long to degrade, into what, where will it condense, will it have effect on the surface it condenses upon, what effect will it have over what period as the bearing loses its buffering/wear design aim as it continues to operate in a less than its designed operating environment ?
When they use bearings it’s not in a vacuum, they put the whole assembly in a nitrogen rich housing.
The article clearly states it can be in a vacuum hence magnetic bearings and in context with my post replying to another re adding pressure filled oil bearings increases drag & requires consideration of consequences as the oil molecules are mobile…
If there is any issue with corrosion it can be dealt with rather easily ie When there is no oil & no ingress of any activated oxygen species. The advance here overall is magnetic bearings with high rpm which means minimal losses & likely faster more efficient response as reaction wheels to move the craft with less need for thrusters. Any roto reaction shaft torque effects on either oscillation or even axial positional variance would be designed with the rate of accepted movement of the craft overall (& the rate of change) factored back down to rotor’s delta velocity or even jerk of the rotor’s rpms.
The vacuum in the cavity need not be exposed to space re atomic oxygen or ozone or anything (ie can be fully sealed with micro tor variance pressure relief) & any surfaces in the rotor/stator assembly can easily be coated with appropriate corrosion protection such as gold, palladium or even iridium in respect of radiation sources (non gaseous) low probability causes of corrosion activating any surfaces such as where there is stator wire to wire contact (minor rubbing reluctance reactions) in respect of thermals & insulation fatigue etc.
ie There need be no requirement to add nitrogen to maintain any partial pressure re bearing oil out-gassing at all as the magnetic bearings suffice within their design criteria hence a (comparatively sealed) vacuum is eminently desirable and results in a nice combination of efficiency enhancement with greater reaction wheel responsiveness for the craft and overall likely at lower power levels, lower mass etc which also likely extends MTBF overall even back to power supply & solar panel size etc :-)
I didn’t think about that; a problem indeed. A mag lev motor would make a lot more sense in this case then.
It would likely cost multitudes more to develop an oil bearing motor for space as well so it wouldn’t work for that reason too.
Also worth noting that any magnetic field escaping a design generates a dipole which will also tend to rotate the craft in 3 axes as it travels through earth’s magnetic field. Tricky little problem.
I don’t imagine the magnetic fields are interacting in that way. It’s too much apart and too little force surely.
P.S. Not that you should not do the calculations though.Better to know than to guess.
No surprisingly not, even tiny dipoles can have a notable effect when combined. Even the current through power systems like solar panels generates dipoles that must at the very least be quantified and minimised so they can be fed into the attitude control systems. On smaller satellites the problem gets higher as the power reQuired to overcome it starts to form a notable part of the power budget.
But will it run on water?
That depends on your skill in designing a robotic Jesus lizard to install it into.
I’m reading through old Hackaday comments and this one threw me for a loop.
Thanks.
zomg the puns
I got it! “motor … revolutionary” get it? revolutionary…because it revolves!
My first thought was, how they are planning to cool it? If the rotor is truly in vacuum and contactless all the heat must be radiated out of the rotor. Rapidly changing magnetic fields tend to warm things up. Maybe I should actually read the paper …