[Nightflyer] has been working on an open source project he calls CAMdrive. CAMdrive is designed to be a multi-axis controller for time-lapse photography. It currently only supports a single axis, but he’s looking for help in order to expand the functionality.
You may already be familiar with the idea of time-lapse photography. The principal is that your camera takes a photo automatically at a set interval. An example may be once per minute. This can be a good way to get see gradual changes over a long period of time. While this is interesting in itself, time-lapse videos can often be made more interesting by having the camera move slightly each time a photo is taken. CAMdrive aims to aid in this process by providing a framework for building systems that can pan, tilt, and slide all automatically.
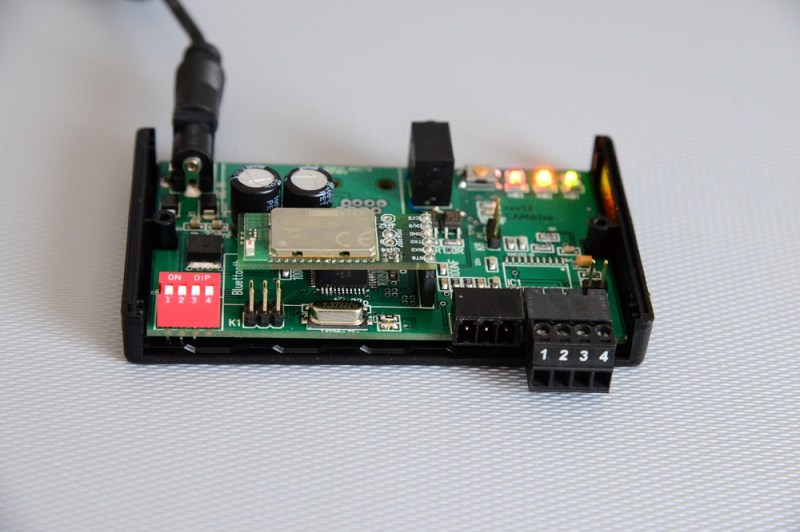
The system is broken out into separate nodes. All nodes can communicate with each other via a communication bus. Power is also distributed to each node along the bus, making wiring easier. The entire network can be controlled via Bluetooth as long as any one of the nodes on the bus include a Bluetooth module. Each node also includes a motor controller and corresponding motor. This can either be a stepper motor or DC motor.
The system can be controlled using an Android app. [Nightflyer’s] main limitation at the moment is with the app. He doesn’t have much experience programming apps for Android and he’s looking for help to push the project forward. It seems like a promising project for those photography geeks out there.














Nice and clean build. Also like the bus concept of it, but in the end it’s not that much different from, say, the high precision rotary platforms a lot of us photo geeks got for various things, albeit linear.
And really Multi-axis has been covered by RC gimbals and pano-bots for some time now. Now, accuracy and resolution of the later could be a problem is very detailed stop-motion, but this is an issue that this project also has jet to encounter or overcome.
What would be new and interesting is a “no-tracks, by-example-programmable multi-axis system that could use accelerometer data and/or software to stabilize stop motion animation from the dolly.
That sounds interesting but I think that’s for now a bit overkill.
The used motor driver uses acceleration/deceleration ramps, that prevents already a big part of camera shake.
I’d consider using GRBL units at each node, as they’re already designed to handle coordinated multi-axis moves.
Very cool, yet another thing to put on my “want someday” list.
“Normal DC motors need a CAMdrive-BrushedDCMotor controller.” Any info on this?
Yes for a dc motor you need another motor-driver because a DC-Motor has a other driving principle.
This has indeed been planned, but not yet developed, because the focus is at the moment on the android app.
Nightflyer,
I like the nice integrated design!
I did a similar dolly setup controlled by android that I hacked together.
http://raspberrywood.com/android-timelapse-dolly/
I have an example android app that I used to control it. It was based off the IOIO board and that library so it has parts very specific to that, but maybe you can learn something from it.
https://github.com/brycedjohnson/Android-Timelapse
Good luck!
Ahh I see you already have an android app for one axis! Well my app probably won’t help you much past that!
Hi Bryce, i think your project has been presented already on HaD. I got it that time already and think that we both had similar thoughts:-)
Thanks for the tip with your Android software I’ll definitely see it again in more detail.