It’s been a while since we’ve seen a balancing cube, but as different companies and universities start making them, we’re excited to see how they continue to develop. This one doesn’t really have a catchy name, but its designers [Erik Bjerke] and [Björn Pehrsson] call it a Nonlinear Mechatronic Cube.
Very similar to Cubli — the first self-balancing cube 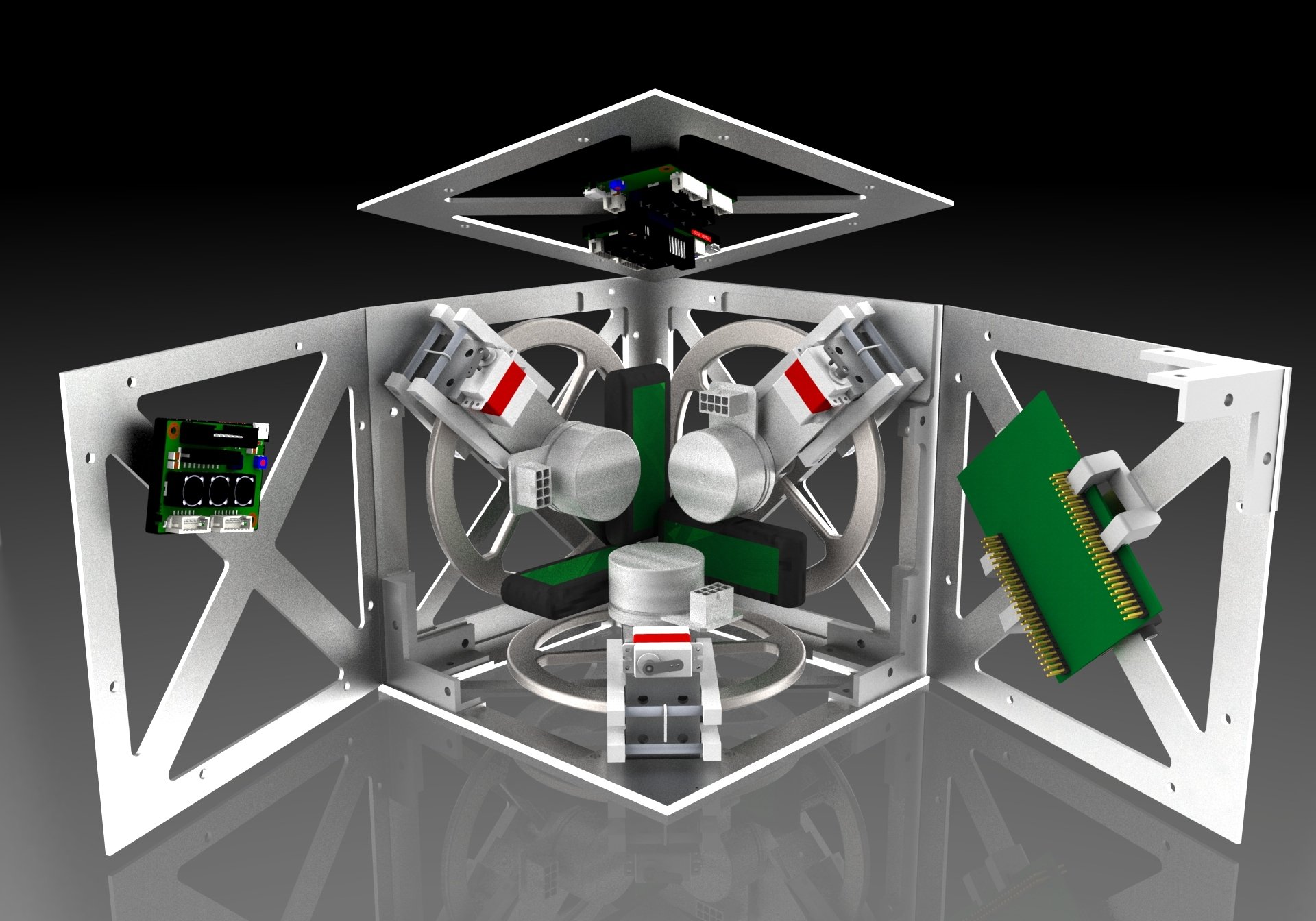 we remember seeing — this cube can jump up from surfaces, “walk” and balance in any orientation.
we remember seeing — this cube can jump up from surfaces, “walk” and balance in any orientation.
The system features an IMU to determine orientation, three gyros powered by beefy 70W motors, three bicycle brakes powered by servo motors, and a microprocessor to control it all.
The way it balances is quite obvious with the gyros, but the ability to jump comes from the rapid breaking of the “reaction wheels”, allowing for a sudden impulse of force that is powerful enough to reorient the entire cube. The interesting part is how both systems are actually controlled individually with separate control systems.
The project is being developed as a master thesis at Chalmers University of Technology in association with Combine AB.














These things are so cool, especially how they’re able to move from a flat position. I wonder if the stiffness of the material affects its ability to do that. Or, in other words, does part of the aluminium frame act like a spring that is compressed using the force generated by suddenly braking the wheel? And, is that why they are able to jump up from a flat position?
I don’t think theirs any spring forces from the frame. If you consider the spinning wheel suddenly stopping (by form of brakes), a huge torque is produced in the same axis of rotation by the wheel into the frame. (kinetic energy is essentially transferred via the brakes from the wheel into the frame.)
Yeah it’s all exploiting torque forces! I wouldn’t be surprised if this tech makes it’s way into transportation, I imagine it would be fun to have a multi-axis reaction wheel in a rally-cross car. Do a barrel roll!
I think that’s a big step closer to Rocket League.
Nice. Only doubtful thing is the use of servo actuated bicycle brakes. Maybe a electro dynamic brake (controlled shorting of motor’s coils) or electro magnetic friction brake applied to the outer diameter of the flywheel would yield a better control of the inertial force.
You are much more limited in the force you can generate when using magnetics for braking (motor or external magnets). Just shorting the coils means all of that energy is dumped into the windings and control electronics so you will want to dump the power into a resistor, which would limit the amount of force you can generate.
What they want is a very quick impulse vs ‘slow and steady’ that the motor can provide. If you have good actuators you can have better high impulse control until the brakes heat up and start to fade.
If you do it how they have been doing it in hybrid vehicles, you just dump it back into the battery.
That’s easy, but any regular BLDC can provide the same torque in either direction (driving or braking), although you could of course get some more torque for a short period of time by applying more current than the nominal value for a given motor.
If you short the motor coils, you get some braking torque, but if the speed is sufficiently high, the torque is actually inversely proportional to the speed (it depends on the ratio of back-EMF constant, resistance, and inductance).
I’m a bit surprised they could get this simple braking system to respond sufficiently quickly and accurately for this to work as well as it does. I’m guessing they aren’t actually controlling the braking torque, but instead control the amount of kinetic energy stored in the wheel and brake hard enough to transfer all of it to the frame, stopping the wheel entirely.
If you happen to have a battery around, you can dump the energy in a battery. Modern BLDC controllers are able to do that. The question remains if the motor is strong enough to provide the required torque.
Someone should tell them that balls and wheels roll better and can stand still in any position without any system inside.
but! you could completely enclose this entire system.
as the cubli developers pointed out, that is a really big deal in dusty environments where rotational joints can get clogged/jammed.
One could build a similar system inside of a cylinder or sphere and have much better results while possibly requiring less energy to run.
only issue i can see with that is the angle of steps it could traverse, a sphere would probably be more energy efficient on flat ground but a flat faced shape allows for corners that can be used to “reach” over steps and vertical obstacles.
i think the geometry of a sphere that fits the same confines as a square would mean less vertical mobility, any reaction wheel system also runs into the issue of sustained force, one has to bleed all the wheel momentum that is built up over time, so a long gentle slope might actually be the doom of a spherical design, with a cube that energy can be bled over a longer period that isnt sufficient to tip it anywhere, a cube also has more volume for payload, especially considering the geometry of internal reaction wheels.
“so a long gentle slope might actually be the doom of a spherical design” is nonsense. The balance algorithm can easily de-spin the momentum wheels by moving the contact point on the surface by rolling the ball in the correct direction. The only effect a slope will have on a wheel-based system is to introduce a tilt on the body to make the centre of mass lay over the centre of pressure (the ball’s contact point on the surface).
The cube, on the other hand, can’t easily shift its centre of pressure without some hopping gymnastics, so can easily saturate the momentum wheels by simply bumping up against a wall or by some malicious SOB (e.g., me) gently pushing on it.
Paul: If on a sloped surface, the contact point will never be under the ball’s geometric center. Unless the ball has an uneven weight distriubution, this means that it will require constant torque from the flywheels to remain stationary, with no good way to bleed it out.
i did have the “might” in there for a reason, though as i understand it you are saying that by moving the ball one could cancel the momentum, one could switch to a non saturated wheel but i dont see how one could bleed momentum by simply moving without changing direction or switching the wheel to an unsaturated axis by yawing so to speak.
all of the above might of course be based on incomplete knowledge or understanding.
a cube could as soon as it is at rest bleed momentum against gravity almost no matter what orientation it was in, so even if one saturated its wheels it wouldnt continue rolling down a hill(till a critical speed/slope at least), it would stop on a face and could bleed momentum there, which is sort of my point, a cube is a self stabilizing design whereas a “dead” sphere would roll wherever gravity and the slopes would take it, it would, unless on a completely flat surface, always take control to maintain position.
Neo, oodain,
Yes, of course, if the ball centre of mass was fixed and coincident with its geometric centre there would be no (easy) way to provide any torque to de-spin the reaction wheels (barring cat-like gymnastics).
Now that I’m thinking about this, I wonder why they aren’t using a control moment gyro instead? Would likely be far more efficient, if standby losses are not significant.
De-saturating the reaction wheels in the case of a ball on a slope is actually very easy; you could simply rotate the ball 180 degrees around it’s vertical axis (or actually, the axis normal to the slope, going through the contact patch), and the saturated wheel will naturally de-saturate, and start to saturate in the other direction. Instead of introducing a sudden rotation, the ball could also continuously rotate slowly, but it would have to stop and reverse every now and then to prevent the third (most horizontal) reaction wheel from saturating.
BB-8?
What about with 8 linear actuators that could transom it onto a cube.
Cool cubicle robot and companion cube possiblities but what the hell was that music
I’ll bet, the original BB-8 has one in it.
Nah, original (robotic) BB-8 is a giant Sphero with extra features.
Snyggt!
How long til we see one encased in the Lament Configuration?
Someone should tell them that you demo ???????????????? explain. This video is really tedious.
First thing I would do is push gently on one side for a while, and see how fast it can spin up while it tries to compensate…
It doesn’t seem we’ve advanced the art very much in three decades though:
https://www.youtube.com/watch?v=Bd5iEke6UlE
Funny that they would shamelessly copy the Cubli video. From the parts deconstruction, to performing identical demos, to even attempting to mimic the black background and floor using some sort of cushions.
https://youtu.be/n_6p-1J551Y
Just like the Cubes from Terrahawks and about the same size too!
Very pleasing to see all the interest!
The guys were on a budget, and i am personally very pleased with their bicycle brake solution.
We have experimented with large-mass furuta pendulums using under-dimensioned electrial motors for the reaction wheel. Our conclusion was that although possible, swinging up the large mass became a real challenge without some way of rapidly changing rotational direction. Simply asking the small electrical motor to do it will result in huge currents exceeding any limits.
The guys chose a much more pragmatic solution.
Hopefully we will have more cool stuff to show soon! We are working with an ROV, a hexapod and a very nerdy statistics thesis at the moment.
Hey folks.
Interesting, and nice. But the “walk” but somewhat bothers me. Granted they ARE doing it, but the huge bangs which happen when it falls back down shall surely damage things.
As it uses torque to move, I see that there needs to be some kind of hybrid between this and the BB8 droid which is the exact opposite and is a sphere.
If it needs to move, it should be able to round out the square to more a sphere, thus reducing the impact on the internal mechanics.
But it is just my thought.
:)