Gyroscopes are one of those physics phenomena that are a means to many ends, but can also enjoyed as a fascinating object in their own right. Case and point being [Hyperspace Pirate]’s tightrope-balancing crawler in the video after the break.
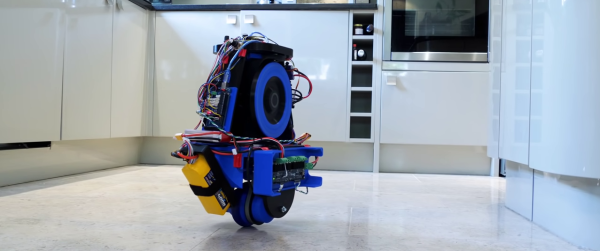
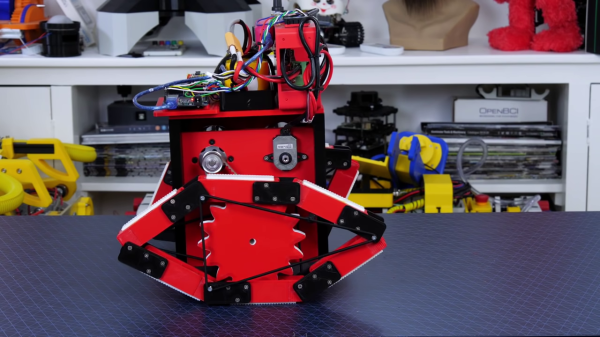
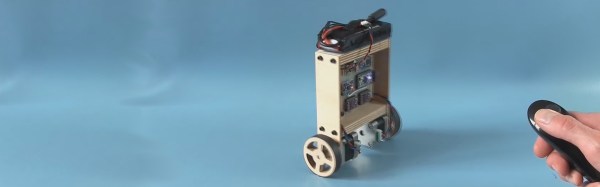
Inside the PLA and aluminum shell is a 3D-printed wheel with steel bolts around the edge for added moment of inertia. It is powered by a low-KV brushless motor with a 3:1 GT2 belt-drive and controlled by a simple servo tester, running on a 4 cell LiPo battery. The 3D-printed drive wheel is powered by a geared DC motor hooked directly to the battery. [Hyperspace Pirate] goes over the math of the design, showing that path to stability is a high speed and high moment of inertia flywheel, while staying well within the strength limits of the wheel’s material.
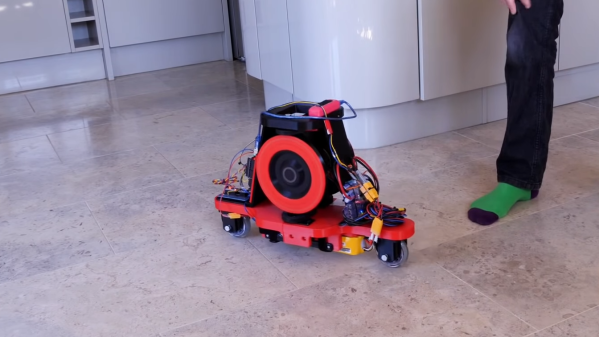
It’s balancing act was first demonstrated on a length of PVC conduit and then on a section of rope, with the characteristic circular wobbling of a gyroscope, known as gyroscopic precession. Without active correction, this the angle of procession will steadily increase until the machine falls over. Even so, it’s still great to watch a small scale version, like the one that inspired this build, would make a pretty cool desk toy.
Gyroscopes are commonly used in attitude indicators and and heading indicators in aircraft, and we’ve also seen them get used for balancing robots. Any ideas for practical uses for a mono-wheel rail/rope walker? Drop them in the comments below.