Robotic control can get very complicated when multiple actuators need to work in coordination with each other. A simple robotic arm will require each joint to be controlled in sequence to attain a particular position. The BeagleBone Blue comes armed with motor drivers, sensor inputs, and wireless and is built for robotics.
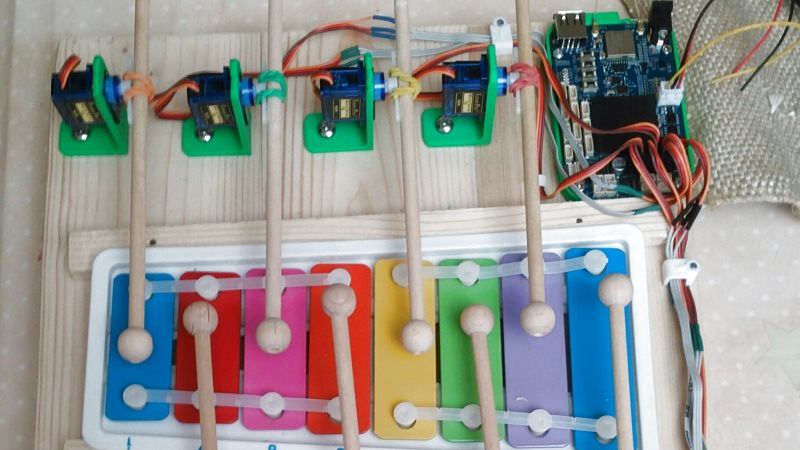
[Andy] has prepared a musical robot called the BeagleBone Blue Electro-Mechanical Glockenspiel using the single board computer. The hardware consists of eight servo motors each with a mallet stick attached to them. The motors themselves are mounted on 3D-printed brackets allowing them to be mounted at the correct height. The servos connect to the main board for position control, however, an external supply had to be used to supply the necessary current to all the motors.
The software side has programs to translate notes into servo positions as well as connect to a web brower via MQTT and websockets. The basic user interface is simple and has buttons to connect to and send the keystrokes. The code, as well as the OpenSCAD designs, can be downloaded from GitHub. Check out the video below for a demo.
This project could be extended to an autonomous robot that plays tunes from the Internet. We are reminded of the rock throwing glockenspiel which was pretty cool and hope there are some permutations to come from both.














Now this is just Bad To The Bone. ;-)
You’re holding it wrong dummy!
+1
https://www.youtube.com/watch?v=Bt9zSfinwFA
Where’s the MIDI input?
I did look into including midi. I don’t have any keyboards etc so it would have been all computer based. Geert Bevin has written some tools to allow you to send midi over a network. For me it was more useful to build a web interface.
Solenoids make this so simple. Just straight line action, fast. Why servos? One pulse, with gravity return.
Solenoids have their problems too.
They’re expensive compared to the servos used here.
Cheap solenoids have pistons with magnets and those stick to the keys.
If the solenoid piston isn’t a magnet it will at least be metal which sounds differently than wood or rubber hitting a key.
Solenoids require a big jolt of power whereas a servo just needs a power supply and a signal so the circuit is simpler.
I’ve done this both ways for a glockenspiel and there are about 1000 wrong ways to do it.
The project was a test to see what the BeagleBone Blue could do. Interestingly, it could not power 8 servos directly so I had to put a shim in to provide power to them.
I rarely choose the simple option, where is the fun in that!
It could use some more cowbell.
My first idea was to have a selection of small drums, cowbells and other jingly things. But I could not source those cheaply hence why I ended up with a slightly out of tune Glockenspiel.