How’s your parallel parking? It’s a scenario that many drivers dread to the point of avoidance. But this 360° ultrasonic sensor will put even the most skilled driver to shame, at least those who pilot tiny remote-controlled cars.
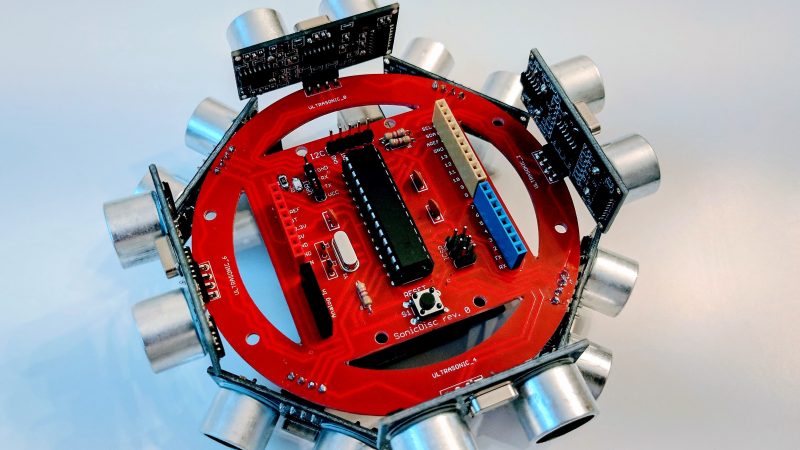
Watch the video below a few times and you’ll see that within the limits of the test system, [Dimitris Platis]’ “SonicDisc” sensor does a pretty good job of nailing the parallel parking problem, a driving skill so rare that car companies have spent millions developing vehicles that do it for you. The essential task is good spatial relations, and that’s where SonicDisc comes in. A circular array of eight HC-SR04 ultrasonic sensors hitched to an ATmega328P, the SonicDisc takes advantage of interrupts to make reading the eight sensors as fast as possible. The array can take a complete set of readings every 10 milliseconds, which is fast enough to allow for averaging successive readings to filter out some of the noise that gets returned. Talking to the car’s microcontroller over I2C, the sensor provides a wealth of ranging data that lets the car quickly complete a parallel parking maneuver. And as a bonus, SonicDisc is both open source and cheap to build — about $10 a copy.
Rather use light to get your range data? There are some pretty cheap LIDAR units on the market these days.
[via r/Arduino]














Tremendously cool, tremendously useful. Well done indeed!
I can use that! It is so cool to see sensors we all have on our workbenches to be implemented in such a way that they can function in such an effective way!
I’m going to use one to parallel park my spaceship in a parallel universe.
I ::burrrrrrrp:: approve.
The problem with autonomous parallel parking has been in the ackerman steering geometry used in road vehicles. This robot uses tank style steering which separates motion and orientation which simplifies the math, never the less it is still not a simple task to make ultrasonic range finders work that well, especially if you have a bunch of them. In the first video his results are reproducible to within 2″ or there about, which is quite impressive.
Maybe vehicles just need a smaller hit-box?
It’s really tough to figure out what they’re trying to demonstrate here. That robot could simply drive straight into the spot, then turn in place, very unlike how cars actually steer. And the “parking spot” is so large in relation to the robot, parallel parking would be unnecessary anyway. So I’m not sure if they really completely missed the mark, or were trying to do something other than what the summary says.
I did something,like this a few years back when replicating the Real World RW12 robot base.The base had 12 Polaroid sonars, so I did the same with the HC-SRF04 sonars, but mounted vertically. I used 12 like the RW12 base as they have a read angle of 30deg. I also triggered them together for speed and to help minimise issues with reflections. The HC-SRF04 is a good choice as it draws so little current. Dimitris has done a great job integrating this all together.