If you’ve ever worked with I2C, you know its one of those things that makes working with modern microcontrollers such a pleasure. With a few wires and not many more lines of code, you can communicate with all sorts of hardware such as sensors, displays, and input devices. There are even I2C keyboards out there, although they tend to be a bit pokey — and not in the good way as it pertains to keyboards.
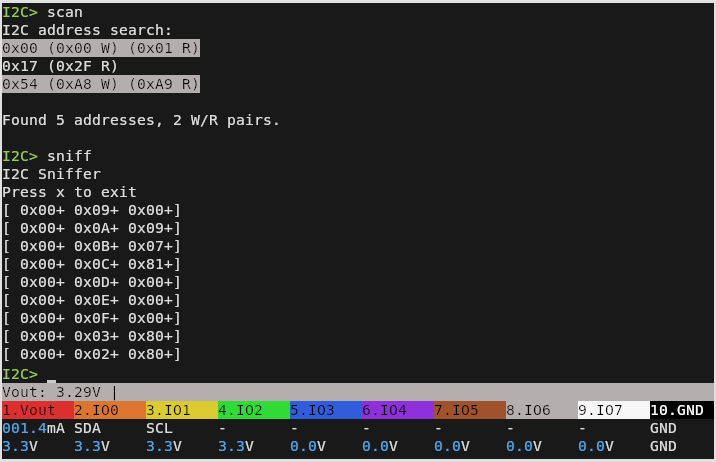
But the bt2i2c project from [Roberto Alsina] promises to improve things. With his firmware flashed to a Pi Pico W, you can establish a connection with any standard Bluetooth keyboard and have the keystrokes sent over the wire via I2C. As far as your project is concerned, the input will appear to be coming from a BlackBerry BBQ20/BBQ10 keyboard using the address 0x1F, which means that there’s already plenty of code out there to work with. While [Roberto] explains its not strictly necessary, connecting a ST7789 display to the Pi Pico over SPI will give you some visual feedback on connection status.
As microcontrollers become increasingly powerful and capable of the sort of thing we would once have done on a “real” computer, a project like this has some fascinating potential. We’ve seen a number of “writerdeck” projects running on chips like the ESP32, and it’s not hard to see the appeal of being able to easily pair your favorite Bluetooth keyboard up to one of them.