The ability to build a robot to take care of a tedious task for you is power indeed. For a few centuries, the task of helping determine one’s location fell to the sextant. Now, you can offload that task to this auto-sextant, courtesy of [Raz85].
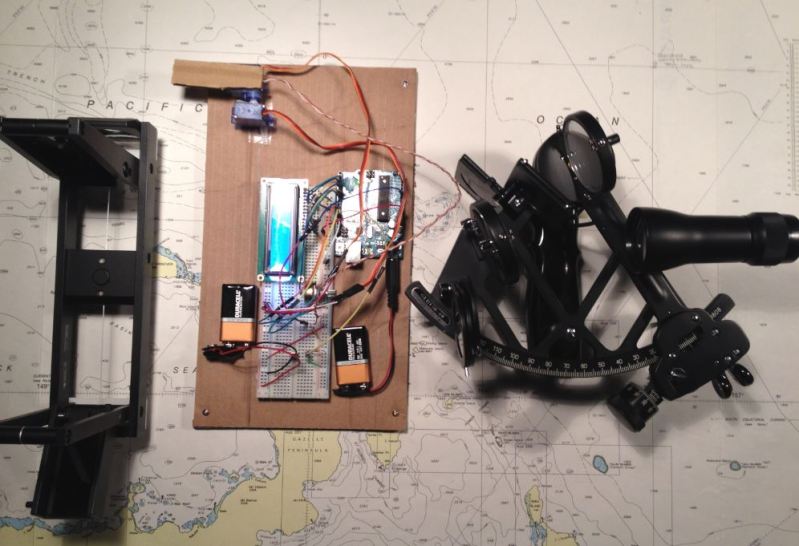
To be clear, this robo-sextant doesn’t give you your exact location, but it does find and display the bearing and altitude of the most luminous object around and display them on the LCD — so, the sun and moon. A pair of cheap servos handle the horizontal and vertical movement, an Arduino Uno acts as the brains and nervous system, and a photoresistor acts as the all-seeing eye. Clever use of some cardboard allow [Raz85] to keep the photoresistor isolated from most all light except what the sextant is currently pointed at. Servos have a limited field of movement, so you might need to adjust [Raz85]’s code accordingly if you’re rebuilding this one yourself.
After taking three minutes to make its rounds of the sky, the Uno records the servos’ positions when fixed on the sun or moon, translating that data into usable coordinates. Don’t forget the best part, it runs on batteries making it convenient for all your wave-faring excursions!
[Raz85] notes that this particular build is more accurate for bearing as compared to attitude, as well as needing manual north-south alignment when in a fixed position. The tradeoff for this mild irritation allows the sextant to be positioned on a boat to get its heading.
If you’re taking to the high seas, you may want another piece of technology that was critical to accurate navigation across the oceanic expanses of our planet: an incredibly complicated timepiece called a marine chronometer.













This is really cool, something I have wanted to work on. Such a system, ultra expensive back in the day sometimes found as expensive mil surplus now, was included on B-52s, SR-71s, and Polaris missiles before inertial navigation was so reliable, and even after in the times before GPS as a backup.
To really drill down the curves of error over time this needs to be geared down for tighter measurements.
This is the start of very cool hacker grade DIY automate celestial navigation systems, completely independent of human maintained space or land beacon services. The ideal would be a gadget you could stick on a car, boat, or airplane(or hiker or bicycle) and can compute location to within a few nautical miles or less from a series of sun or star fixes and an altimeter reading. A post apocalypse portable GPS of sorts.
The only thing I can contribute right now is an adapter between inexpensive Davis sextants and the inexpensive Celestaire bubble sight artificial horizon for use on land for practice or even in the air.
https://www.thingiverse.com/thing:38221
The sextant is good enough for real sea nav, my Davis Mk12 was the sole tool used for navigating between Seattle and Hawaii in the 80s. Take a sight, click the stopwatch, get under deck, listen to time on the shortwave, subtract the min&sec between sight and time station from the stopwatch, do the math, cross the ocean and sail knowing where you are.
Looks likely to get stuck in gimbal lock near the equator.
You can speed up your sky scan with a quad tree approach if you can work out how to have a variable field of view for the light sensor. Which of 1..4 is brightest then of that quad which is sub quad brightest etc.Just recentring a 2×2 sensor with + divider, on the brightest quad will do, no variable FOV required, more of a true divide and conquer. That would give you just under 1 degree of accuracy in 14 moves.