No goats were harmed in the making of this 3-DOF Stewart platform for [Bruce Land]’s microcontrollers course at Cornell.
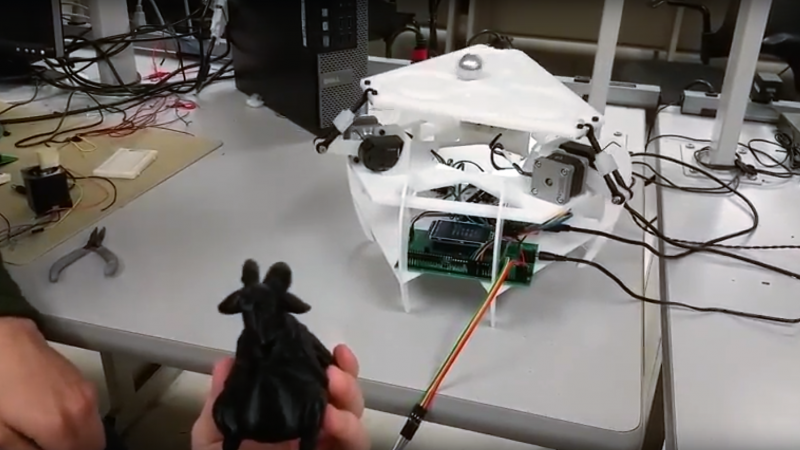
If the name “Stewart platform” doesn’t ring a bell, the video below will help you out. [Team Microgoats] built a small version of the mechanical system commonly seen in flight simulators, opting for 3 DOF to simplify the design. Their PIC32-controlled steppers can wobble and weave the table in response to inputs from an MPU-6050 six-axis accelerometer embedded in the base of a 3D-printed goat. Said goat appears to serve no other role in the build, but goats are cool, so why not? And if you’ve ever seen a mountain goat frolicking across a sheer vertical rock face like it was walking across a parking lot, you’ll understand the connection to the balance and control offered by a Stewart platform.
[Bruce Land]’s course is always a bonanza of neat projects that pop up in our tipline this time of year, like a POV box fan, a coin cell Rickrolling throwie, and a dynamometer for small electric motors.














my radio control helicopter has a flight controller that does this with 3 servos and a 120 degree swash plate. flybarless controllers like this have been around for years.
It’s interesting that they used steppers. Are those gear boxes? I’m always surprised how much torque those motors can output.
They need to mount the encoders better. One was shifting back and forth in the closeup.
Technically a Stewart platform is a 6DOF parallel machine. This design and build, while quite nice, doesn’t exactly qualify as a true Stewart platform.