No goats were harmed in the making of this 3-DOF Stewart platform for [Bruce Land]’s microcontrollers course at Cornell.
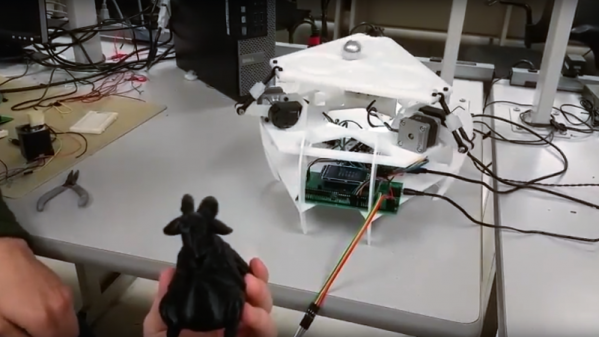
If the name “Stewart platform” doesn’t ring a bell, the video below will help you out. [Team Microgoats] built a small version of the mechanical system commonly seen in flight simulators, opting for 3 DOF to simplify the design. Their PIC32-controlled steppers can wobble and weave the table in response to inputs from an MPU-6050 six-axis accelerometer embedded in the base of a 3D-printed goat. Said goat appears to serve no other role in the build, but goats are cool, so why not? And if you’ve ever seen a mountain goat frolicking across a sheer vertical rock face like it was walking across a parking lot, you’ll understand the connection to the balance and control offered by a Stewart platform.
[Bruce Land]’s course is always a bonanza of neat projects that pop up in our tipline this time of year, like a POV box fan, a coin cell Rickrolling throwie, and a dynamometer for small electric motors.
Continue reading “Balance Like A Mountain Goat On This Simple Stewart Platform”