It’s a common situation faced by every hard-working American – you get home after a long day at the calcium mines, and find yourself stuck with a pile of colored golf balls that simply aren’t going to sort themselves. Finally, you can put away your sorting funnels and ball-handling gloves – [Anthony] has the solution.
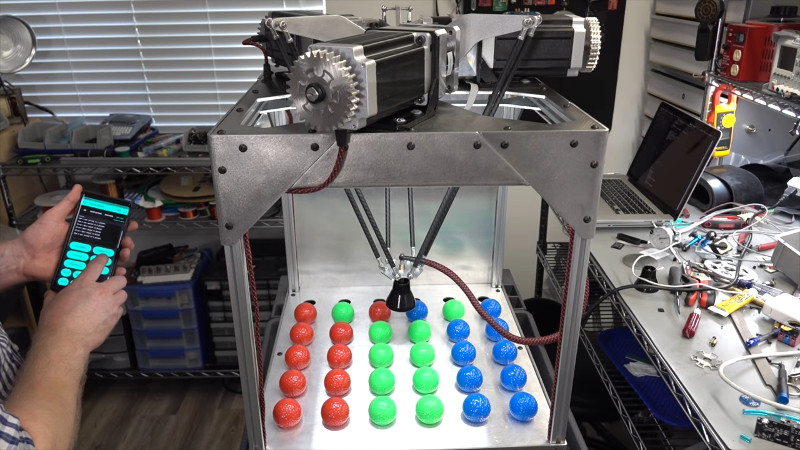
That’s right – it’s a delta robot, tasked with the job of sorting golf balls by color. A Pixy2 object tracking camera is used to survey the table, with the delta arms twitching around to allow the camera to get an unobstructed view. Once the position of the balls is known, a bubble sort is run and the balls rearranged into their correct color order.
[Anthony] readily admits the bubble sort is very inefficient at this task; it was an intentional choice so it could be later compared with other sorting methods. [Anthony] also goes into detail, sharing the development process of the suction gripper as well as discussing damping methods to reduce noise.
Delta machines are always fun to watch, and are a good choice for sorting machines. We’ve seen some really tiny ones, too. Video after the break.














Proto G, prodigy
B^)
I clicked because of the plasma cut parts. Why would somebody use what could be such a great, sturdy 3d printer chassis for a fun but impractical hack like this I wondered. Then I realized he has his own plasma cutter so a chassis like that is no problem at all for him.
20 some years ago I learned about 3d printing from a poster on the wall of my college’s technology building. I thought it was an amazing idea. I was excited that such a thing existed but sad because as a computer science major I thought I would never get to use one myself.
About a year ago I finished building a 3d printer of my very own. Technology and more important the availability of information, parts and tools are so much greater now that doing something like that once seemed unobtainable is easy!
I am excited about the coming day when a plasma cutter is a more universally accessible item! That is going to be awesome!
Are coloured golf balls a thing? Maybe because they are easier to spot on the grass?
Get orange ones for yourself and green ones for your friends!
Colored balls are commonly used for miniature golf. They make it easy to tell it a glance which ball belongs to which player.
Added points for ones with UV-active paint, can do dark minigolf courses lit only with blacklights.
Just don’t get hit by the windmill blades…
Would be cool to see this modified for sorting a bucket or tray of balls. The robot would need to poke around the bucket to find balls it can suction, then scan the color and sort. The suction head may need to be narrowed to only grab at the top.
Why does it move to the center position each time it moves a ball? Can’t the movement be optimized to go straight from origin to destination?
It doesn’t need to, I just haven’t had the time to program everything. I would need to calculate every possible motion path between all the different combinations of swap moves. You can’t move straight to the ball position without knocking over the other balls so each move needs a custom path profile. It was just faster for me to program the way it is shown in the video.
If you think you need to calculate every possible path you’re doing it all wrong. You want to develop equations/algorithms to move the position to any X,Y location then calculate the X,Y position of each ball. The path is then set by telling the motor controller to move to x,y for ball/hole 1 then move to x,y for hole 2.
You can make the path straight if you like or just let each motor go from the start position to the end position as it will. You definitely want to add in acceleration though.
The 1st derivative of position is speed. The 2nd is acceleration and the 3rd is called jerk. You have tons of jerk in your design meaning you accelerate very quickly. Eventually your toy will shake itself apart. Setting up a nice acceleration profile will make it very smooth and the balls won’t fall off the suction cup from being jerked around.
Finally I don’t know why you would be knocking the balls out of their holes unless you’re not lifting the ball/cup up high enough, or you’re shaking the entire structure from the excessive jerk.
From the loud sounds it makes when it moves, it sounds like he’s not using bothering with acceleration. This will lead to parts wearing out faster and obviously noisier operation.
Well I mean look at that frame and those beefy steppers! Seems like it’ll be fine through sheer virtue of unfettered over-engineering.
sophomoric comment redacted
redacted comment redacted