Sorting algorithms are a common exercise for new programmers, and for good reason: they introduce many programming fundamentals at once, including loops and conditionals, arrays and lists, comparisons, algorithmic complexity, and the tradeoff between correctness and performance. As a fun Christmas project, [Scripsi] set out to implement twelve different sorting algorithms over twelve days, using Christmas lights as the sorting medium.
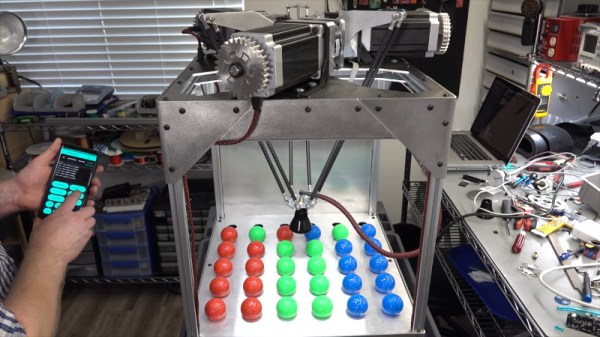
The lights in use here are strings of WS2812 addressable LED strips, with the program set up to assign random hue values to each of the lights in the string. From there, an RP2040-based platform will step through the array of lights and implement the day’s sorting algorithm of choice. When operating on an element in the array the saturation is turned all the way up, helping to show exactly what it’s doing at any specific time. When the sorting algorithm has finished, the microcontroller randomizes the lights and starts the process all over again.
For each of the twelve days of Christmas [Scripsi] has chosen one of twelve of their favorite sorting algorithms. While there are a few oddballs like Bogosort which is a guess-and-check algorithm that might never sort the lights correctly before the next Christmas (although if you want to try to speed this up you can always try an FPGA), there are also a few favorites and some more esoteric ones as well. It’s a great way to get some visualization of how sorting algorithms work, learn a bit about programming fundamentals, and get in the holiday spirit as well.

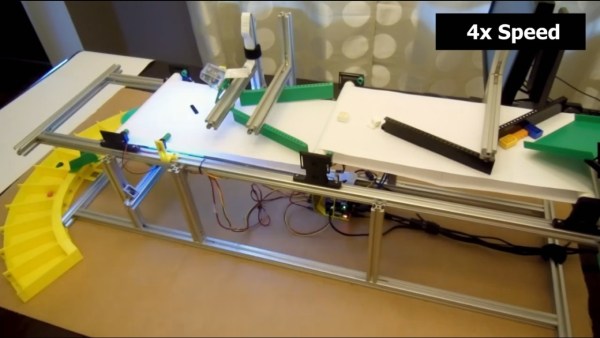
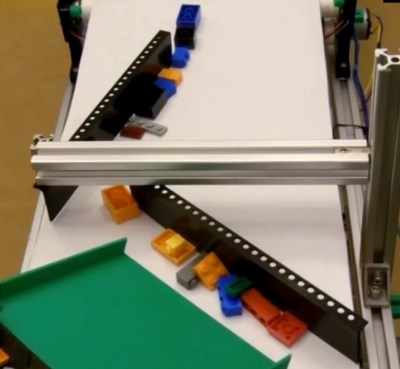 However, he didn’t find that out right away. He first experimented with his own techniques, learning that if he fed bricks to his conveyor belt by dropping a batch of them in a line perpendicular to the direction of belt travel then no subsequent separation attempt of his worked. He then turned to
However, he didn’t find that out right away. He first experimented with his own techniques, learning that if he fed bricks to his conveyor belt by dropping a batch of them in a line perpendicular to the direction of belt travel then no subsequent separation attempt of his worked. He then turned to