At first, we thought this robot was like a rabbit until we realized rabbits have a 300% bonus in the leg department. SALTO — a robot from [Justin Yim], [Eric Wang], and [Ronald Fearing] only has one leg but gets around quite well hopping from place to place. If you can’t picture it, the video below will make it very obvious.
According to the paper about SALTO, existing hopping robots require external sensors and often are tethered. SALTO is self-contained. The robot weighs a tenth of a kilogram and takes its name from the word saltatorial (adapted for leaping ) which itself comes from the Latin saltare which means to jump or leap.
The robot considers itself in four distinct modes: stance is when it is standing on the ground, liftoff is when it is launching itself, flight is in the air, and touchdown is when it reconnects with the ground. Balancing the robot during stance is old hat, of course. But upon liftoff, the robot computes an error term for the velocity and uses that to compute a correction value. The robot has a tail and two small propellers to control its attitude.
At the start, the robot balances on three points: its toe, its rear ankle, and one end of its tail. Using gyros, it is able to set initial values. It then stands up in different poses and uses the thrusters to zero out any roll and pitch.
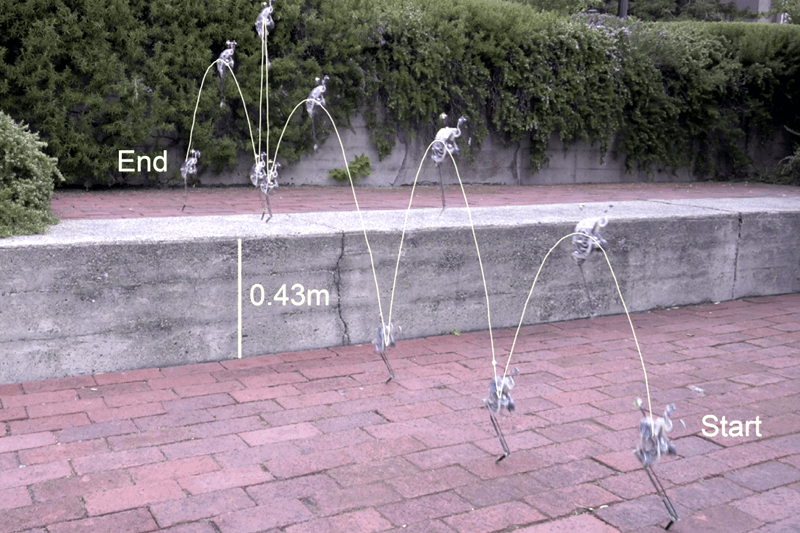
We were not far into the video before we wondered if the beastie could climb stairs. It can’t. According to the authors say that estimate errors mean the foot can move up to a half meter away from where you wanted it to land. However, they believe future versions will have improved estimation that would let it climb stairs, leap over furniture or other obstacles, and handle a variety of terrain. We only hope they print the poor thing a kangaroo body.
Jumping robot always brings back our nightmares of Atlas breaking down our bedroom door. He has no problem with stairs. We’ve also seen a prototype lunar rover that can jump over things, even though that’s not its primary mode of locomotion.














Mount a frag grenade on that and you’ll have a Bouncing Betty that will hunt you down!
I thought the same. Send 500 of these armed into an Airbase and watch every single plane being destroyed.
Who needs one of these!
“Ex-ter-mi-nate! We will con-quer the
Un-i-verse. As soon as
We learn how
To deal with
Stairs.”
That was so cute when it hopped into the bush and got stuck
I thought it hopped into the bush to escape the kid with the joystick.
I just needs a buddy to jump on it’s leg when it falls down.
Sounds more like a one legged chicken than a rabbit. Doing the chicken dance, what happens when suddenly headless. Two small props (wings) and a tail.
Specifically it sounds like the chickens from this anime:
https://youtu.be/j_xLkPimJxc
reminds me of https://ghibli.fandom.com/wiki/Hopping_Lantern
Get about 50 of them and have them herd toddlers
SO much cooler because it’s untethered! Awesome!
…reminds me too much of Mantrid’s one arm robots in the old SyFy show LEXX. They took over the universe.
Skynet approves.
assimilating data.
These would make an interesting toy
Ewww !
The sound that thing makes – especially when in crashed into the wall XD
Just imagine being hunted by a swarm af these things going “Ewe! Ewe! Ewe!” all the time.
Hopping rovers have actually operated on asteroids. They hopped on the asteroid Ryugu after being dropped from the Hayabusa2 mission.
https://apod.nasa.gov/apod/ap180924.html
Less control and strength than SALTO, but they are on an asteroid, which ups the cool factor a bit.
Absolutely amazing. I want to see the plans! Or description of the motors? Did I miss something?
Nice blog amazing story.
Next step, strap four of them together and make a very bouncy Spot Mini.