Ever since he looked into them as a way to water and care for his plants, [Tom] has been fascinated with cable robots. These high-flying gadgets can move in three dimensions over huge areas, provided you’ve got the ability to string up the aforementioned cables. But despite their flexibility, there hasn’t been a whole lot of hobbyist level development with these unique systems.
With his entry into the 2019 Hackaday Prize, [Tom] is hoping to change that. He’s learned a lot by building his own cable robots, and now wants to take it to the next level. Ideally with collaboration from the community, if he can find other hackers looking to outfit their homes or workshops with their own miniature sky cranes.
So what can you do with a cable robot? In the video after the break, [Tom] shows one of his creations dutifully transporting beer cans across the room and stacking them into a pyramid. Admittedly this isn’t a particularly useful capability (unless you run a bar, perhaps), but it does show the speed and dexterity of the system even when crossing large distances. If you’ve ever wanted to play the home edition of “Automate the Freight”, this one’s for you.
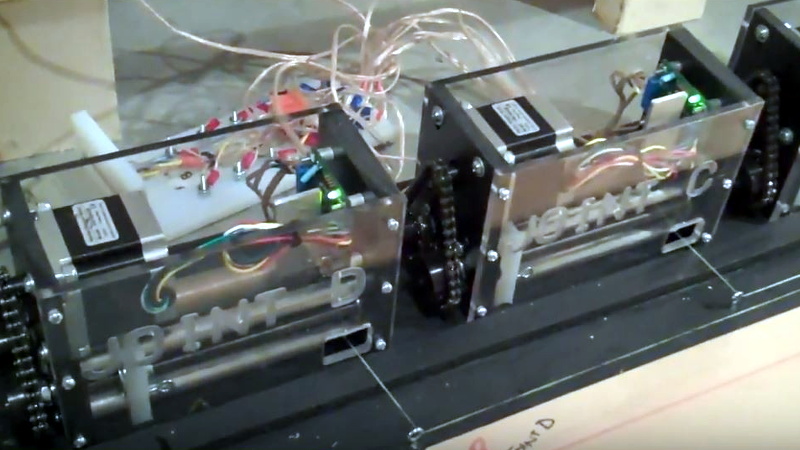
The system uses a trio of 36 volt stepper motors powered by a homebrew SLA7078 driver that [Tom] designed himself. Each stepper turns a geared-down spindle to which a strong cable is attached. With some clever routing around the workspace, careful orchestration of these small winches can be used to move the point where all the cables meet in 3D space. All that’s left is mounting your gadget of choice to this central point, and away you go.
We’ve seen the concept used commercially, but as far as hobbyist projects go, the most activity we’ve seen in this space would have to be the various room sized 3D printers that have popped up over the years. It would be interesting to see what kind of interesting projects the community could come up with if they had something with a little more muscle.

















There was a neat hot-wire foam cutter based on a cable system controlled by LinuxCNC. It was mounted to the workshop roof and used a C-shaped frame to maintain cable tension. The web site has died, but the wayback machine has it.
https://web.archive.org/web/20161219002806/http://www.cnc-hotwire.de/
LinuxCNC has been used to control a number of such machines. The most recent I know of needed the winches 200m apart, which made for interesting stepper-wiring. https://youtu.be/aTaBl4HJT2M?t=29
This is not so surprising, one of the earliest uses for LinuxCNC back when it was a NIST project, before it escapes into the wild, was the Robocrane: https://en.wikipedia.org/wiki/Robocrane
Beyond the problems of catenary tension limiting the lifting ability at very flat cable angles, this looks like a great way to homebrew a (light) skycam.
Reminds me of my days as a student. For my second year project I made a cable robot with a electromagnet picking up and stacking coins. This was the days before GRBL and route planning was a new concept to me. Interestingly I found the easiest path for my 8086 computer was not to plan the route, but to compare options. A stepper can either step or not. As there was only 3 steppers, and any could either not step, step out or step in, it was easier to calculate all the options, compare errors and chose the one with the lowest error to the next point on the path. The key here was that as all the sum of square errors were simply compared, one could avoid all square routes. The 8086 had no floating point support, so square routes are exceedingly processor intensive.
I always liked this simple approach the code was clear and easily understood and modified. I have oftrn wondered about hacking this approach into GRBL. Although my implementation did not have acceleration and deceleration algorithms implemented at the time.
As a side note, having little access to parts, the stepper driver was made of 4 x 555 timers per stepper. They are cheap and will drive 250 mA at 12 V. It was more than enough for odd steppers I found in the scrapyard.
Wow, 1 amp from parallel 555s? Would Any mismatched timing problems cause heat when switching state? Nice hack!
No, each side of each coil was driven with only a single 555 output. The steppers were unusual because although they were large, if I remember correctly nema23, they were low current and 24 V. Early 80s, 5 inch full bay floppy disk drive head placement motors. It was all about the holding torque, not step speed.
But if you wish, a series resistor on the output of your 555 will allow paralleling as many as you like. I would guess 1 ohm, at 1/2W. That would reduce your final output voltage by about 250mV at full drive, per 555.
As an aside, a quick twist of the shaft would happily generate 240V. My friend has one, and twisting it, realised it may generate a small voltage. He stripped all 6 wires, stuck them in his mouth and gave it a hefty spin. Needles to say, after a jolt, he called his brother and let him experience the joys. His brother, having no siblings left to energise, called his mom. She was not impressed.
Yes!
Then the next step for acceleration, etc. Is just to add time as a fourth “steppable” axis. Momentum? Fifth steppable axis… etc.
Reminds me of how diagonal lines are drawn with pixels.
Always wondered why they make it so complicated.
Pixeled lines was exactly the inspiration.
I can’t believe the lack of mention of the Tuco Flyer https://hackaday.io/project/25939-tuco-flyer
I can’t believe we forgot our own piece on cable bots from a couple years ago: https://hackaday.com/2017/10/20/cable-bots-arise-domination-of-the-universe-is-at-hand/
(In which we mentioned the Tuco Flyer…thanks for jolting my memory.)
Well, that is the last link in the article.
Doh! I can’t believe that I didn’t check all the links before posting another!
I believe all of these things.
“But despite their flexibility, there hasn’t been a whole lot of hobbyist level development with these unique systems.”
It is a delta robot, what part has not had much development?
Linear delta kinematics != tripod kinematics. Tripod kinematics, used here, will give you the simplest version of a 3D cable robot. Everything else ends up being an over-constrained system, and is harder to work with.
Yes, of course. I thought I could get away with something more complicated and for which this is a special case. It is a delta robot in which the “rods” are constrained to pass through a fixed point or pivot instead of the arc of a servo arm or a vertical slide. Delta’s have been explored thoroughly and there for the special cases have as well. Skycam has been around a couple decades, hasn’t it?
There was some woman on youtube who I swear built a massive cable robot that she was using to film stuff around her shop I think? I remember it was really impressive. Can’t remember her channel name though.
Ah, NVM, it was the Tuco Flyer, mentioned elsewhere in this thread.
Love cable bots. Haven’t found a use for mine yet, but don’t regret working so long on it. Very fast and strong enough to lift me. Unfortunately I quickly realized that it needs lots of software to be useful. A vision system, etc. before it’s a help around the garage.
LinuxCNC makes a good job of the software. There aren’t any cable kinematics included in the base install, but there are some available on the internet, and the kinematics sample documetation is based around developing a bipod cable kins.
http://linuxcnc.org/docs/2.7/html/motion/kinematics.html
I have in myself considered a rail bot that uses a set of ceiling rails.. I have been really in deep meditation about robotics and what scares me and when it comes to functional robots this idea is not far off my own… Idea in all seriousness threat and even a 2 foot drone can be enough to get firmware hacked and make “horrible shank bot” which in fairness could lift the weight of a feather it grinded off a wall or something to hurt people asleep ect… The idea was in truth with humanoid robots later to have a second lock isolated from main system or house ai so rail bot or humanoid bot is always in a cupboard locked and a crown job and me explicit accept unlock railbot for example… Been told the same I am too paranoid and yet i make a, for example set of humanoid robots go in a self driving car and 3d print from 4 cranes while internals all to a pattern set instruction driven unfold pattern I still said the same the main head house ai system only spawns daughter ai systems and like openbsd systrace or selinux templates the robots act out of character at all the mother ai kills the children and reloads the ai data set again.. But I digress… In short having a railbot with 4 different guage tether cables is me unlocking cupboards to heavier guage wires while even stupid light guage tether could be an ion drive drone that lights my cig connected to a rail or indeed a hair dryer drone blimp or usual drone but tethered as still worried that if I fall asleep and hacked the drone won’t reach me… But even say an ion drive light drone connects hooks to then authorise a more heavy rail ceiling drone to look off hooks… Very very exciting stuff I prefer for security and Conveniance ceiling rail than humanoid but 5 years from now all really are a tad concerned and excited about commercial offerings and indeed worry myself when had so many issues with firmwares and things I may go in truth very paranoid security and measures rather than even a commercial robot in 10 years…
Mixed reality like hololens though later, how convenient to see a self driving robot in a halo lens virtual halogram that I, with a rather average set of glasses, stuck the data screen to the ceiling with hololens to keep an eye on it and see full 3d data output if needed but 50th self driving robots to remote site and patterns created in vr 3d build time lapsed sequenced progressions… So much 10 years brilliant yeah my car went for service and got an engine upgrade and it self drives to the garage and engine fitted and service then it did a few laps on a test circuit and came home to my garage.. I periodically stuck the screen holoform to my ceiling in hololens but end of day review all data.. Excited as well as scared…
Sounds like a robot ai is learning to speak here. Nice bot.
Do you guys have knowledge on the patent’s filed for these machines? I have designed something close to this and would like to release it as open source.