
Most often, humans and robots do not have to work directly together, instead working on different parts in a production pipeline or with the robot performing tasks instead of a human. In such cases any human-robot interaction (HRI) will be superficial. Yet what if humans and robots have to work alongside each other? This is a question which a group of students at MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) have recently studied some answers to.
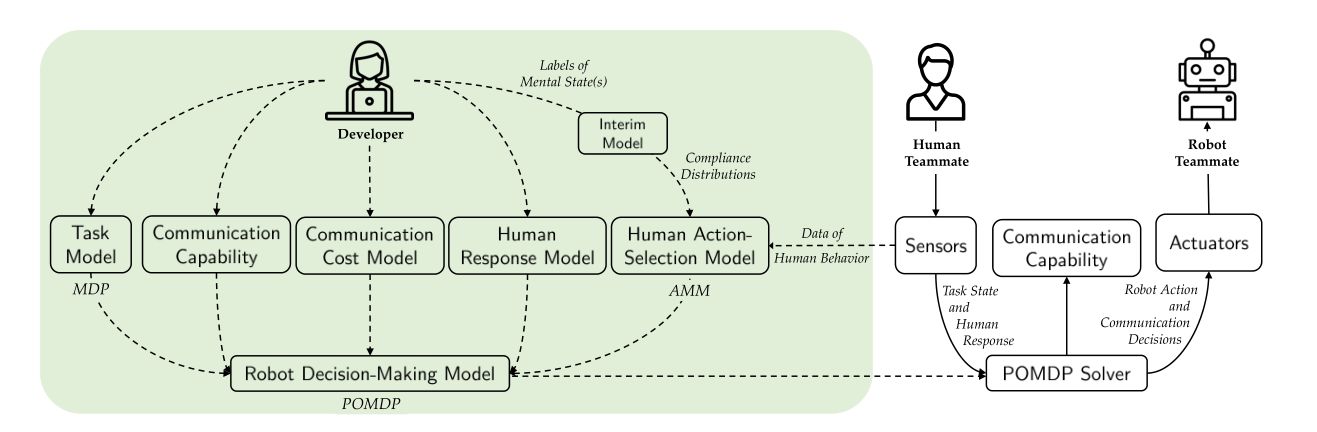
In their paper on human-robot collaborative tasks (PDF), they cover the three possible models one can use for this kind of interaction: there can be no communication (‘silent’), the communication can be pre-programmed (state machine), or in this case a Markov model-based system. This framework which they demonstrate is called CommPlan and it uses observation data from human subjects to construct a Markov model that can integrate sensor data in order to decide on its next action.
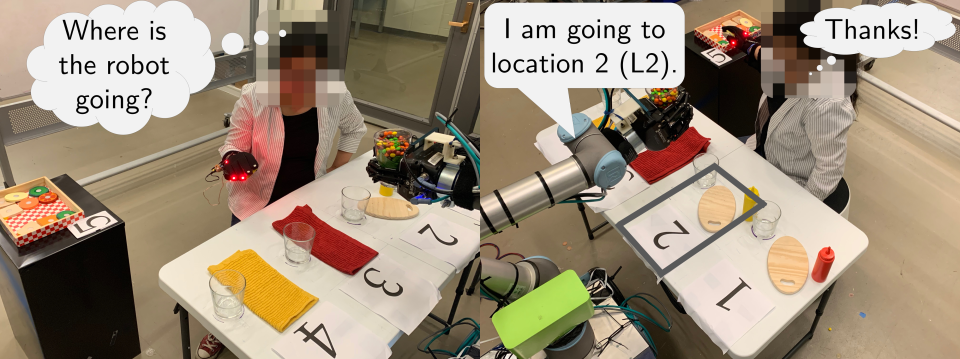
In the experiment they performed (the preparation of a meal; see the embedded video after the break), human subjects had to work alongside a robot. Between the three different approaches, the CommPlan one was the fastest, using voice interaction only when it deemed it to be necessary. The experiment’s subjects expressed hereby a preference for bidirectional communication, much as would occur between human workers.
The principles of HRI and human-human interaction are essentially the same: for optimal team work each member needs to receive and provide the information which they or other team members need at the right time. Too early or too late causes friction, omitting information can cause delays and worse. Redundant information can also cause frustration:

The goal of the CommPlan framework thus is to use its sensors and model of the human mind state (what would be appropriate in a given situation) to only give the information that its human partner expects and appreciates:
The benefit of having a framework like CommPlan is thus two-fold: not only does it improve the overall efficiency of the process, it also makes the interaction go smoother, with fewer points of friction and frustration. Whether our team mates are warmblooded humans or servo-actuated robotic arms, at the end of the day the humans at the very least prefer to feel content about the team effort.
Here’s to the day when our robotic friends will give their human partner a hi-five to celebrate the collaborative solving of a particular difficult task.














Having workplace robots use sensors to detect any unusual objects (read: humans) placed in its programmed movements path ought to be implemented in the machine!
Considering that’s a UR5 arm they’re working with, I’d say that’s not an issue. It’s very good at stopping when it bumps into you. Source: I’ve been bumped into more than I can count when programming one.
Instead of tacling the “entitled work”, I’d rather like to see robots try to make a difference in the industry where it actually counts. Watching this forging video I wonder how many more years we’ll be waiting for some improvement there, so that humans need not apply for the dirty, hazardous and dangerous jobs.
https://www.youtube.com/watch?v=ZWXFhdeOjMY