A lot of people complain that Roombas are unreliable, poor at their job, or just plain annoying. Few people complain they’re not fast enough in a straight line. Regardless, [electrosync] set about building the world’s fastest Roomba for his own personal satisfaction.
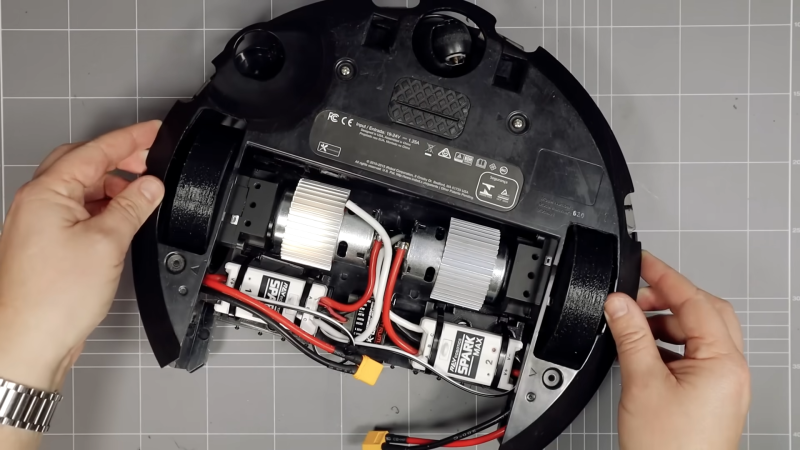
For this challenge, [electrosync] set his own rules. The build must look like a Roomba, use two drive wheels, and one motor per wheel. It also has to maintain its vacuum functionality. After stripping down a used Roomba, he set about carving out space in the chassis for upgraded hardware. Brushed DC 775 motors were selected for the drivetrain, and these run through a 3:1 planetary reduction gearbox. 3D-printed mounts were then used to install the new motors in the existing chassis. New 3D-printed wheels completed the drivetrain. The original Ni-MH cells were replaced with a pair of 3-cell lithium polymer batteries for more power.
Measured with a Bluetooth GPS device, the upgraded Roomba achieved an impressive 36 km/h (22 MPH). With new wheel designs clad in urethane rubber and an improved anti-wheelie device, it hit a mighty 49 km/h (30 MPH). Adding 4-cell batteries pushed things further to 57 km/h (35 MPH), but the Roomba became difficult to control.
The gauntlet has been thrown down. Do you think you can build a faster Roomba? Time to get hacking! Video after the break.













I must have been lucky for once. I am into my second roomba with no issues at all. The first one is still working fine but the NiMh battery gave up after running a daily schedule for five years. When I was looking for a replacement battery there was a sale so I bought a new one for marginally more than a new battery. I am planning to rebuild the battery pack… some day…
They have drop-in Lithium Ion replacement battery packs for them now – they run forever on those
Faster in a straight line, but how’s it do in corners? I see the genesis of an entire thoroughly-impractical racing league…
The downforce from the vacuum could help…
You inadvertently hit on a brilliant idea: The next step.
have the vacuum be part of it, make them run up walls or on steeps inclines with drops and the vacuum has to be strong enough to hold them up (I would lobe to say upside down but i appreciate that might be a bit much.)
I immediately thought the vacuum would be used for additional downforce. This record setting fan car generates downforce of of 2,000kg while weighing 1,000kg, so driving on the ceiling is possible. https://electrek.co/2022/06/26/watch-electric-fan-car-record-goodwood-hill-climb/ .
Need to sipe the tires. May help in turns also.