
Ever look out at a pond, stream, or river, and wonder how deep it is? For large bodies of water that are considered navigable, it’s easy enough to pull up a chart and find out. But what if there’s no public data for the area you’re interested in?
Well, you could spend all day on a little boat taking depth readings and making your own chart, but if you’re anything like [Clay] you could build a solar-powered autonomous robot to do it for you. He’s been working on the boat, which he calls Gumption Trap, for the better part of a year now. If we had to guess, we’d say the experience of designing and building it has ended up being a bit more interesting to him than the actual depth of the water — but that’s fine by us.
 The design of the boat is surprisingly economical, as far as marine designs go. Two capped four-inch PVC pipes are used as pontoons, and 3D printed brackets attach those to an aluminum extrusion frame that holds the electronics and solar panel high above the water. This arrangement provides an exceptionally stable platform that would be all but impossible to flip under normal circumstances.
The design of the boat is surprisingly economical, as far as marine designs go. Two capped four-inch PVC pipes are used as pontoons, and 3D printed brackets attach those to an aluminum extrusion frame that holds the electronics and solar panel high above the water. This arrangement provides an exceptionally stable platform that would be all but impossible to flip under normal circumstances.
Around the back of the craft, there’s a pair of massive 3D printed thrusters, complete with some remarkably chunky printed propellers. The lack of rudders keeps things simple, with differential thrust between the two motors enough to keep the Gumption pointed in the right direction.
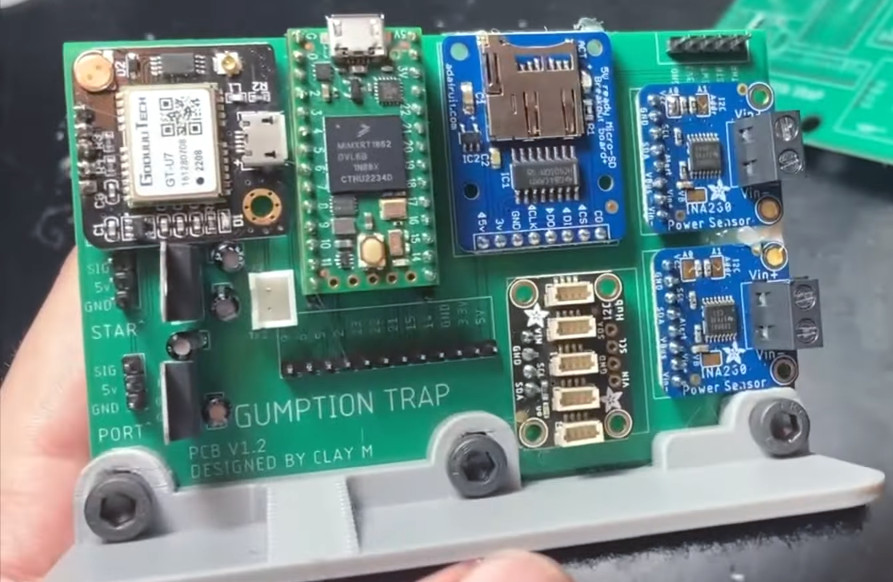
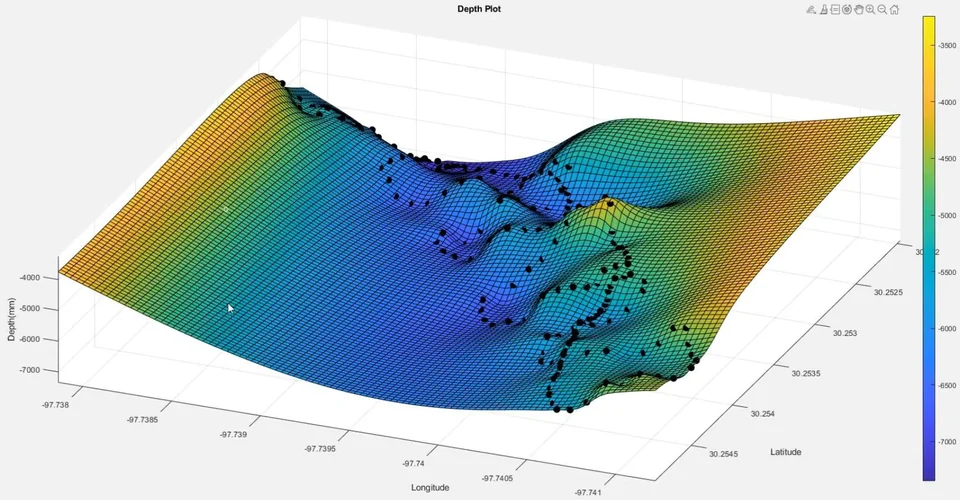
A waterproof container holds the batteries, solar charge controller, radio gear (for manual control), and the main computer. That computer is a custom PCB containing various modules that make up the brains of the operation. That includes a Teensy microcontroller, a GPS, compass, and a Ping echo sounder from Blue Robotics that [Clay] says cost more than the rest of the project put together. But of course you get what you pay for, and it’s hard to argue it wasn’t worth the investment when you look at the impressive 3D depth maps he’s managed to produce with the data it spits out.
For anyone looking to set sail with a similar craft, [Clay] has provided the source code for his boat, the board files for his custom PCB, and even the MATLAB code used to graph the depth data. He’s also put together the trio of videos below, which document the construction of the boat over the last eight months. The videos provide an interesting look at how the design has matured over time.
This isn’t the first PVC pontoon boat to have graced these pages, last year we covered a similar design from [wesgood] that’s also worth taking a look at if you’re thinking of building your own robotic watercraft.














Have you considered adding a downward facing camera to create a visual map in addition to the depth map? Marine archaeologists are starting to use this kind of robot to map areas close to shore weather suspect there may be sunken sites, ships, or artifacts. They can then use the map to decide what areas are worth diving to.
I imagine this project might be of great interest to university archeology departments who can’t afford to buy a commercial robot, but that have engineering schools who might love to work on a project like this.
Nice work!
Would need to be an ROV. Imaging the seafloor visually will be difficult unless you have relatively still water. A river will have too much movement, thus silt in the water column.
That looks like a fun project, and useful, too.
Projects like your/this have a lot of different disciplines to pull together, and not easy, from the physical construction, to the software, to the data interpretation. So, congratulations.
Perhaps the thruster box/deck mount could be made adjustable in height, to maintain a nice low center of gravity, like you have, but also to compensate for weight without using ballast. Alternatively, you could make a ballast tank, and fill it with water.
Perhaps you could slip in a rubber grommet (not the Harbor Freight ones) where the motor wires penetrate the shrouds.
A Teensy 4.1 would give you more processing power for the same code.
Have you checked out Paraview? As far as the props, you could also do a study with OpenFoam.
I made one of these several years ago for a survey company using a Parallax Propeller as the brain. I was able to release the source code for free and you can find it at https://emlia.org/portfolio/navcom_ai/
Thank you :) I came here to comment on this project being cool because I tried the same thing a few years ago and had many issues both with guidance and long plugs of ghost returns messing up the results I could never figure out lol. It will be cool to give your code a try. Many thanks
Gumption Trap I love the name. How Zen.
How “Zen and the Art of Motorcycle Maintenance” to be precise.
Correcting someone’s quote is most definitely not zen- :P
You can also save a little cost by using lighter weight PVC. Schedule 40 gets expensive at the larger sizes. “Thinwall” is frequently used on cisterns where there is low pressure. You will have to search for a supply place (i.e. farming or cistern supply house) that carries it though.
DWV (Drain, waste, vent) PVC is lighter than schedule 40 and commonly sold in the big box stores. It’s used in construction to reduce the cost of non pressurized plumbing.
Nice! There’s a group at Plymouth (UK) uni doing similar things https://www.plymouth.ac.uk/research/marine-autonomous-sensing-group.
We often see their uav boats (uab’s??) out testing in Plymouth Sound.
There is a very low cost sonar module called Vexilar SP100 SonarPhone. This is a WiFi enabled sensor and someone on the web reverse engineered the data stream. Cost is about $135 (Walmart) or just over $100 (eBay). This might be a way to lower the cost of the total system.
Very interesting article. I’d love to map some of the rocky areas in our nearby lake.
Any links to the reversed engineered data stream?
https://github.com/scherererer/SonarPhony
This is a good starting point.
Unfathomable.
Hi, I would like to get the source code and more information about the x,y,z points that were collected and mapped. Is there any way I can get in touch with Clay?
https://emlia.org/portfolio/navcom_ai/