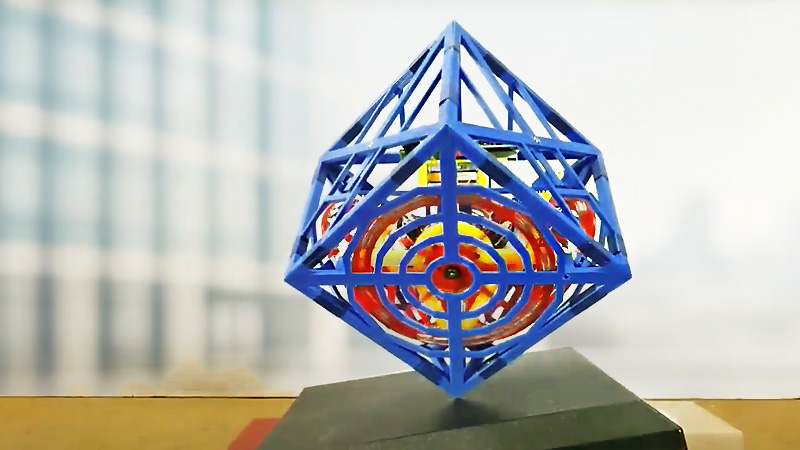
Self-balancing devices present a unique blend of challenge and innovation. That’s how [mircemk]’s project caught our eye. While balancing cubes isn’t a new concept — Hackaday has published several over the years — [mircemk] didn’t fail to impress. This design features a 3D-printed cube that balances using reaction wheels. Utilizing gyroscopic sensors and accelerometers, the device adapts to shifts in weight, enabling it to maintain stability.
At its core, the project employs an Arduino Nano microcontroller and an MPU6050 gyroscope/accelerometer to ensure precise control. Adding nuts and bolts to the reaction wheels increases their weight, enhancing their impact on the cube’s balance. They don’t hold anything. They simply add weight. The construction involves multiple 3D printed components, each requiring several hours to produce, including the reaction wheels and various mount plates. After assembly, users can fine-tune the device via Bluetooth, allowing for a straightforward calibration process to set the balancing points.
If you want to see some earlier incarnations of this sort of thing, we covered other designs in 2010, 2013, and 2016. These always remind us of Stewart platforms, which are almost the same thing turned inside out.














a) If it is a reaction wheel, the additional bolt nuts are there to add polar mass moment of inertia, not to add weight. b) Stewart platforms are static positioning devices. This is a dynamic balancing device. Please clarify .
*Well actually……
Don’t be that guy. This isn’t a scientific paper and what he said was perfectly understandable.
Nah, this is warranted. The description is flat out wrong.
“Adding nuts and bolts to the reaction wheels increases their weight, enhancing their impact on the cube’s balance.”
Which part of this sentence is wrong? Where exactly is the description “flat out wrong”?
While I agree that it’s all about the moment of inertia and not weight per se, adding weight does increase the moment of inertia, so there is no fault here.
I saw the linked video. The creator has done an amazing job in making the self balancing cube. Sorry if i was not polite earlier.
Those are the project creator’s words. Head over to the hackaday.io page and take it up with them – rather than actively being a PEBKAC over here.
I saw the linked video. The creator has done an amazing job in making the self balancing cube. Sorry I was not polite earlier.
So cool. 😉👌🏻
beautiful project, congrats
Why three wheels? There are only two degrees of freedom to control.
The third degree of freedom (vertical axis, Z) isn’t controlled, as evidenced by the little spin they show in the video.
Am I missing something? Why the complication of a third wheel? Or alternatively, why not control the Z rotation too?
three wheels so it can balance regardless of orientation. Without the third wheel you wouldnt be able to program the more advanced movements these devices are capable of. https://youtu.be/n_6p-1J551Y?si=ClWvfoIbzZ_NgJpA&t=97
Ah, OK. That would be cool if that was demonstrated in the video. I wonder if the code supports arbitrary balance points.
It’s presumably countering the gyroscopic precession of its own balancing movements. The spin they showed in the video was a result of an outside force, but it doesn’t spin when it’s balancing itself on a corner on an inclined plane.
Also: probably to allow for future work as well, probably some form of rolling locomotion.
Where does one get the motors for this project? Searching around for ‘Nidec 24H’ seems to provide a range of motors, most common being 24H055M020.
Excellent project! Very well thought out and executed.
This is basically the same PID technology to self level drones.