
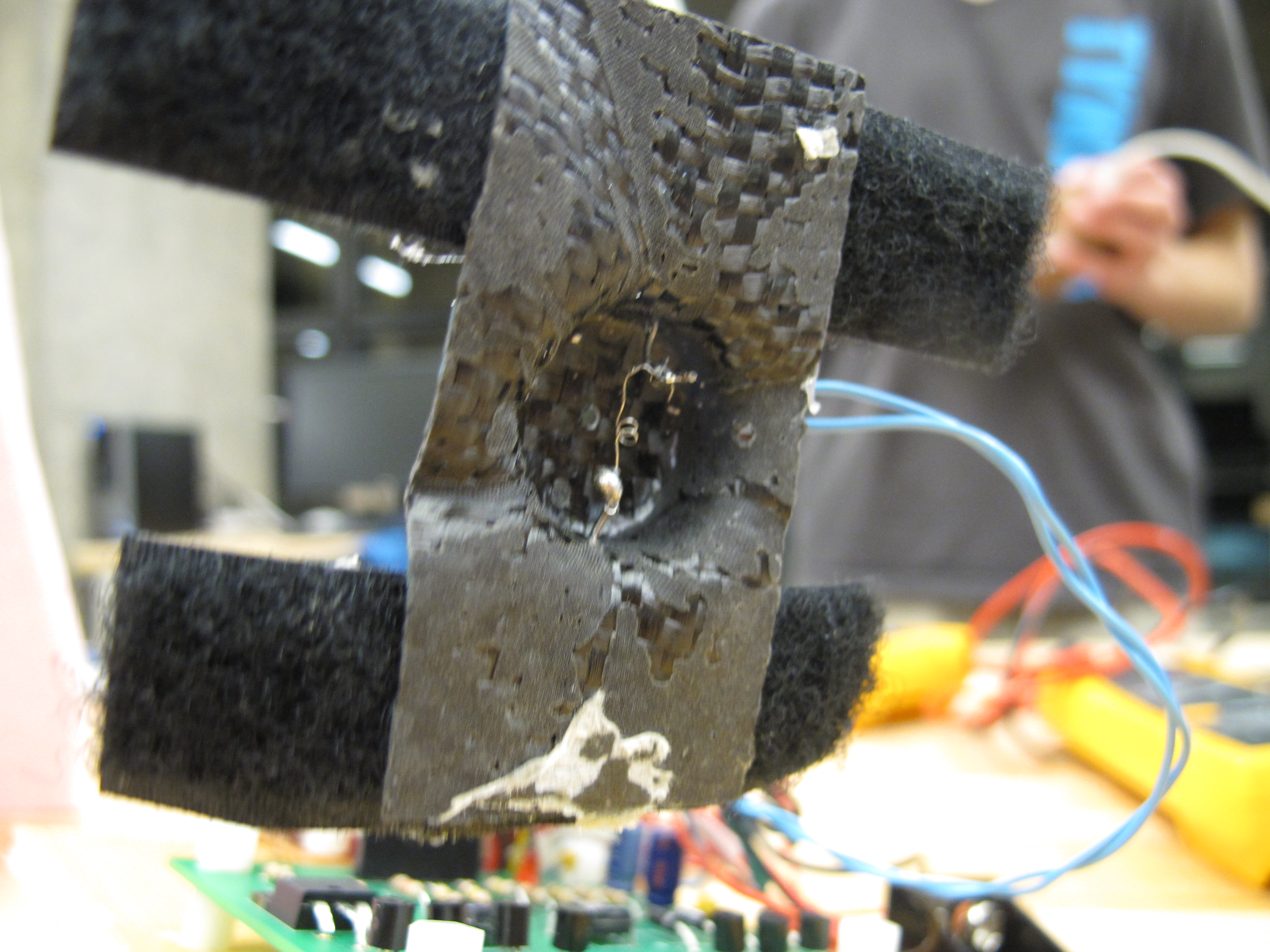
This jamming gripper design is the simplest we’ve seen so far. It uses a syringe to generate the suction necessary for the orange appendage to grip an object.
As with previous offerings this uses coffee grounds inside of a balloon. When pressed against an object the grounds flow around it. When a vacuum is applied to the balloon those grounds are locked in place, jamming themselves around the item for a firm grip. About a year ago we saw a hardware-store grade design which used a vacuum pump for suction and a shower head as the gripper body. This time around the plastic syringe serves as both.
The plastic tip was cut away and the resulting hole covered with a cloth to keep the coffee in place. After installing the coffee-filled balloon the grip can be operated by pulling the plunger to lock the grounds in place. It’s not going to be as easy to automate as a pump-based rig. But if you just want to toy with the concept this is the way to go.




















{kind=link}