As the technology available to the average hacker and maker gets better and cheaper each year, projects which at one time might have only been within the reach of government agencies are inching closer to our grasp. Take for example the impressive work [Charlie Nicholson] has put into his StratoSoar series of autonomous gliders.
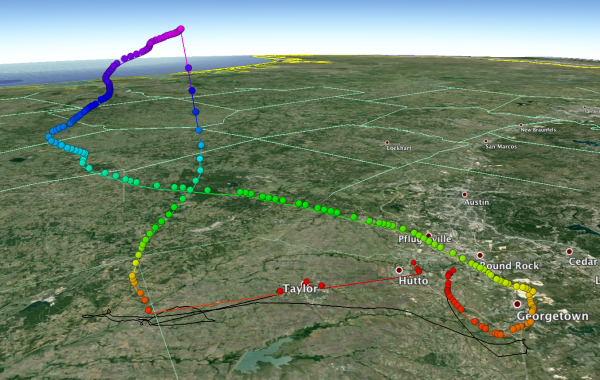
Dropped from several thousand feet by a high-altitude balloon, the glider’s avionics are designed to either guide it along a series of waypoints or head directly towards a specific target. Once at the given coordinates it can initiate different landing programs, such as spiraling down to the ground or releasing an onboard parachute. It’s an ambitious combination of custom hardware and software, made all the more impressive by the fact that it’s been put together by somebody who’s not yet old enough to have a driver’s license.
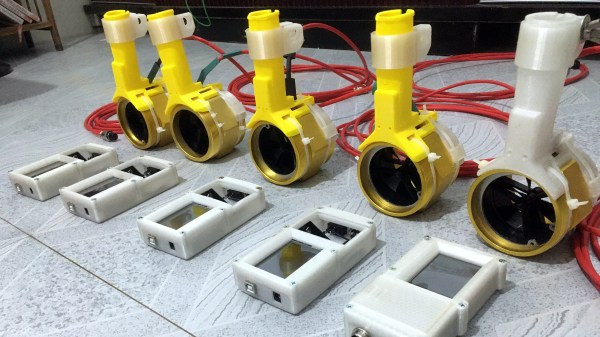
 [Charlie] originally experimented with developing his own airframe using 3D printed components, but at least for now, found that a commercial off-the-shelf foam glider was a more practical option. All that’s required is to hollow out some areas to mount the servos, battery, and the avionics. This takes the form of a custom PCB that contains a ATSAMD21G18 microcontroller, an ICM-20948 inertial measurement unit (IMU), connections for GPS and LoRa modules, as well as several onboard sensors and some flash storage to hold collected data.
[Charlie] originally experimented with developing his own airframe using 3D printed components, but at least for now, found that a commercial off-the-shelf foam glider was a more practical option. All that’s required is to hollow out some areas to mount the servos, battery, and the avionics. This takes the form of a custom PCB that contains a ATSAMD21G18 microcontroller, an ICM-20948 inertial measurement unit (IMU), connections for GPS and LoRa modules, as well as several onboard sensors and some flash storage to hold collected data.
The goal of this open source project is to make these sort of unmanned aerial vehicles (UAVs) cheaper and more accessible for hobbyists and researchers. Eventually [Charlie] hopes to offer kits which will allow individuals to build and operate their own StratoSoar, making it even easier to get started. He’s currently working on the next iteration of the project that he’s calling StratoSoar MK3, but it hasn’t had a flight test yet.
We’ve seen various attempts to launch autonomous gliders from balloons in the past, but none from anyone as young as [Charlie]. We’re eager to see the StratoSoar project develop, and wish him luck in future test flights.
Continue reading “StratoSoar Glider Flies Itself From High Altitude”

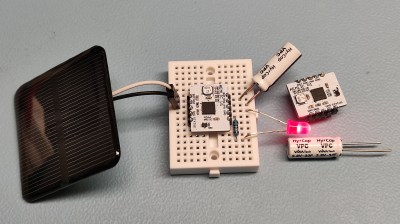
 [Dave Akerman]’s interest in high-altitude projects means he is no stranger to long-range wireless communications, for which LoRa is amazingly useful. LoRa is a method of transmitting at relatively low data rates with low power over long distances.
[Dave Akerman]’s interest in high-altitude projects means he is no stranger to long-range wireless communications, for which LoRa is amazingly useful. LoRa is a method of transmitting at relatively low data rates with low power over long distances.