Sure, there are smart canes out there, commercial and otherwise. We’ve seen more than a few over the years. But a group of students at Stanford University have managed to bring something novel to the augmented cane.
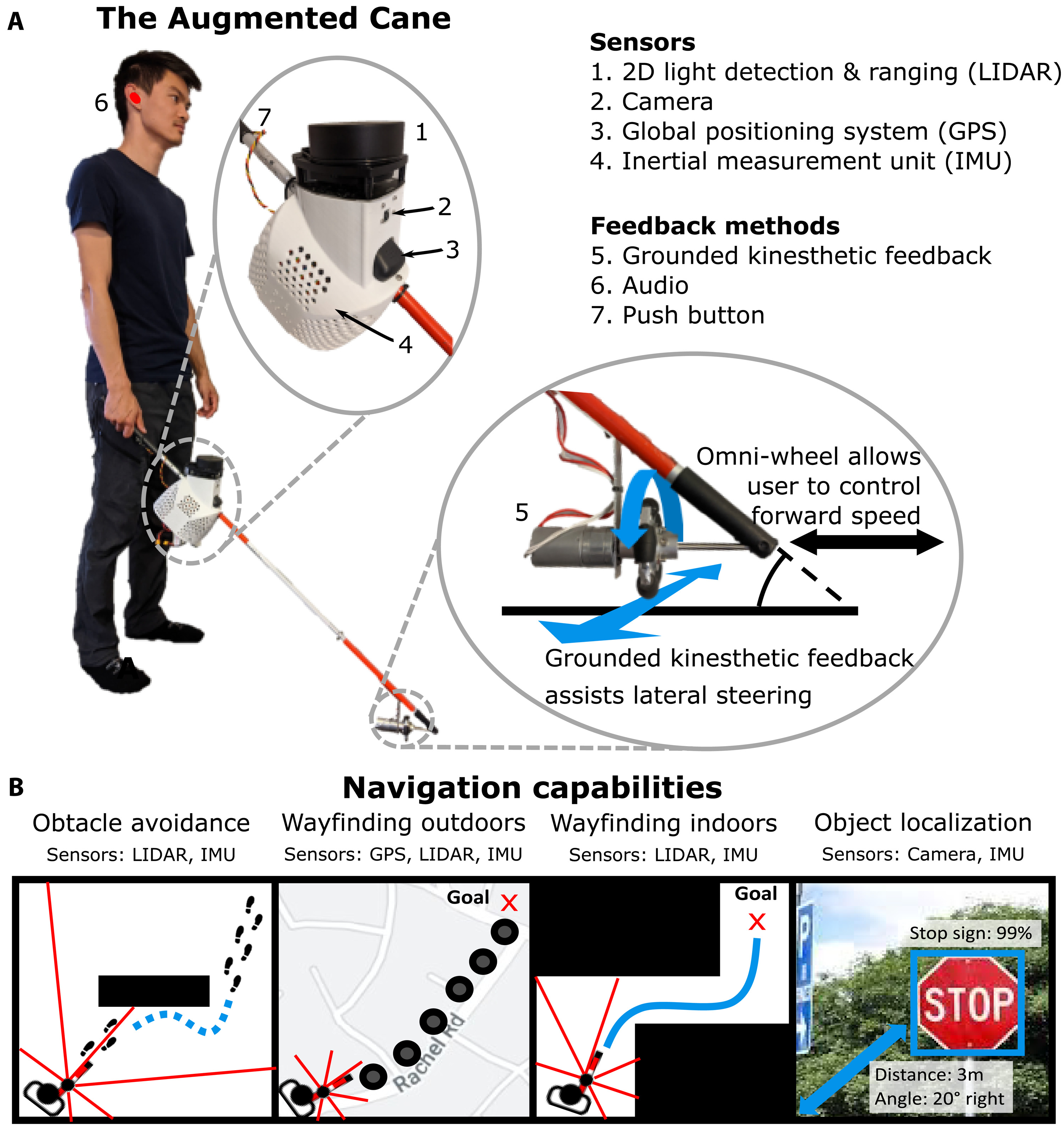 Theirs features a motorized omni wheel that sweeps smoothly from left to right during normal cane operation, and when the cane senses an object that turns out to be an obstacle, the omni wheel goes into active mode, pulling the user out of the path of danger.
Theirs features a motorized omni wheel that sweeps smoothly from left to right during normal cane operation, and when the cane senses an object that turns out to be an obstacle, the omni wheel goes into active mode, pulling the user out of the path of danger.
Tied for best part of this build is the fact that they made the project with open hardware and published all the gory details in a repo, so anyone can replicate it for about $400.
The cane uses a Raspi 4 with camera to detect objects, and a 2-D LIDAR to measure the distance to those objects. There’s a GPS and a 9-DOF IMU to find the position and orientation of the user. Their paper is open, too, and it comes with a BOM and build instructions. Be sure to check it out in action after the break.
There’s more than one way to guide people around with haptic feedback. Here’s the smartest pair of shoes we’ve seen lately.
Continue reading “Omni-Wheeled Cane Steers The Visually-Impaired Away From Obstacles”