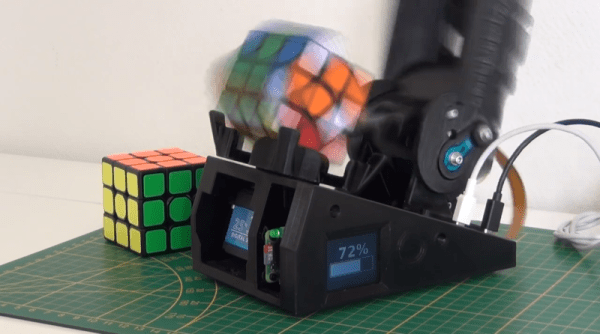
Solving Rubik’s Cubes is a learnable skill. However, to compete at the top level, you’ll have to train hard. Speed cubers can solve a 3×3 cube in under ten seconds these days, after all. [aaedmusa] was a long way off that speed, but his robot is an absolute demon that solves at a rapid pace.
The robot relies on a Teensy 4.1 microcontroller to run the show, paired with its Ethernet kit for connectivity. It runs six stepper motors via TMC2208 drivers, enabling it to directly actuate each face of the cube. Purists will note, however, that the steppers are fitted with adapters that slot directly into modified center squares on the cube. A regulation Rubik’s, this is not.
The design doesn’t feature a machine vision system to capture the state of the cube. Instead, the cube’s status must be input to a web app on an attached computer. Once the cube’s state is loaded into the program, though, the mechanical job of solving the cube can be achieved in under five seconds. Even with six actuators, that’s not fast enough to beat the human world record of 3.47 seconds, but it’s still pretty darn good.
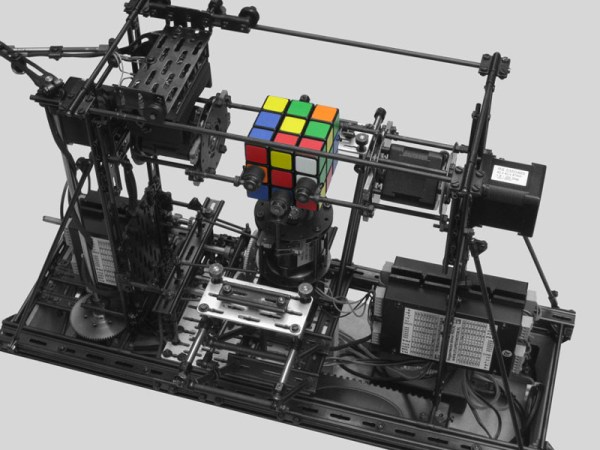
It’s funny to think that way back in 2011, both robots and humans were so much slower at solving cubes. If only all the world’s problems were as simple as a jumbled up toy from the 1970s.
Continue reading “Rubik’s Cube Solver Does It In 4.56 Seconds”