Yale University brings us quite a treat with their Openhand Project.
If you’ve ever operated a robotic arm, you know that one of the most cumbersome parts is always the end effector. It will quickly make you realize what an amazing work of engineering the human hand really is, and what a poor intimation a simple open-close gripper ends up being.
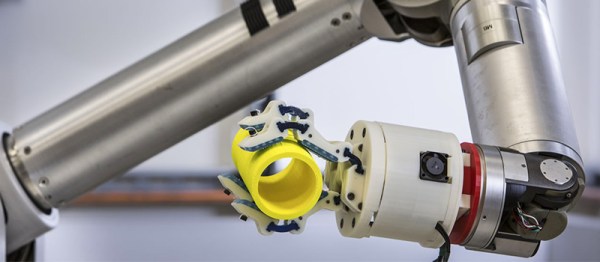
[Yale] is working to bring tendon-driven robotic hands to the masses with an interesting technique of combining 3D printing and resin/urethane casting. Known as Hybrid Deposition Manufacturing (HDM), it allows the team to 3D print robotic fingers that also contain the mold for finger pads and joints, all built right into the 3D part. The tendon-driven fingers allow for a very simple design that are not only easy to make, but have a low parts count as well. Because of the human-like tendons, the fingers naturally curl around the object, distributing it’s force much more evenly and naturally, much like a human hand would. In the videos after the break, you can see the building process, as well as the hand in action.
Best news is that it’s all open source. They also include some python libraries so you can customize the CAD files fit your needs.
Continue reading “Openhand Combines 3D Printing With Urethane Casting”









