In the drag racing world, a Christmas tree is the post at the start line that sequentially lights up a set of yellow lights followed shortly after by a green light to tell the drivers to go, the lights obviously giving it its seasonal name. Included at the base of the tree are lasers to detect the presence of the cars.
[Mike] not only made his own Christmas tree for his RC cars, but he even made an end-of-track circuit with LED displays telling the cars how long they took. Both start and finish hardware are controlled by Pololu Wixel boards which has TI CC2511F32 microcontrollers with built-in 2.4 GHz radios for wireless communications.
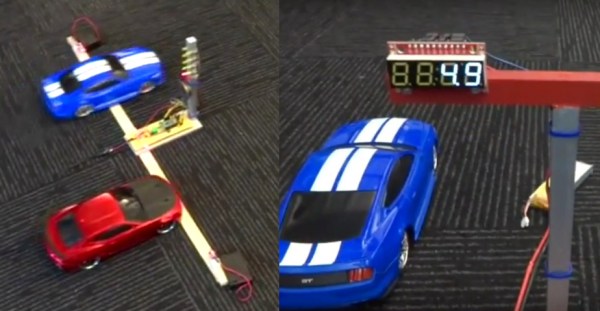
In addition to the LEDs, the Christmas tree has a laser beam using a 650nm red laser diode for each car at the start line that’s aimed at a TEPT5600 phototransistor. If a car crosses its beam before the green light then a red light signals the car’s disqualification.
The end-of-track circuit has 7-segment displays for each car’s time. [Mike] designed the system so that the Christmas tree’s microcontroller tells the end-of-track circuit’s microcontroller when to reset the times, start the times, and clear the times should there be a disqualification. The finish line controller has lasers and phototransistors just like the starting line to stop the timers.
Oh, and did we mention that he also included 1980’s car racing game sounds? To see and hear it all in action check out the video after the break. If the cars seem a little drunk it’s because pushing left or right on the controller turns the wheel’s fully left or right.
Continue reading “RC Drag Racing Christmas Tree And Speed Trap”










