
 Although in our imagination those scale models of cars certainly can drive and steer just like their full-scale counterparts, there’s something incredibly satisfying about watching them truly come to life. Here [diorama111] is an absolute master at the craft, with the most recent conversion of a 1:150 Toyota Probox car model once again demonstrating these skills with casual ease.
Although in our imagination those scale models of cars certainly can drive and steer just like their full-scale counterparts, there’s something incredibly satisfying about watching them truly come to life. Here [diorama111] is an absolute master at the craft, with the most recent conversion of a 1:150 Toyota Probox car model once again demonstrating these skills with casual ease.
We previously covered such conversions, with another recent one in 2024 involving another 1:150 scale model. That particular one demonstrated driving around on scale model roads, which shows a good practical use of this conversion if you want to have e.g. a scale model town with cars that actually drive around.
In the video you can see how first the base of the scale model has a tiny 25 mAh Li-polymer battery installed, along with two motors, one for steering and one for driving using a rod-linkage system and a lead screw.
The tiny gears used were salvaged from mechanical watches, with photoreflectors keeping track of the driving and steering positions. Remote control is done by infrared, with a tiny SMD IR receiver module in the car, while charging and programming of the MCU is done via terminals installed on the bottom.
In the final part of the video the car is demonstrated driving around, with working head- and rear lights, as well as blinkers and stop lights, including the top rear one. In the video description links are provided to the various schematics and software on Google Drive for those who are feeling like a fun Sunday afternoon project.
Continue reading “Building A 1:150 Scale Toyota ProBox Micro Remote Control Car”


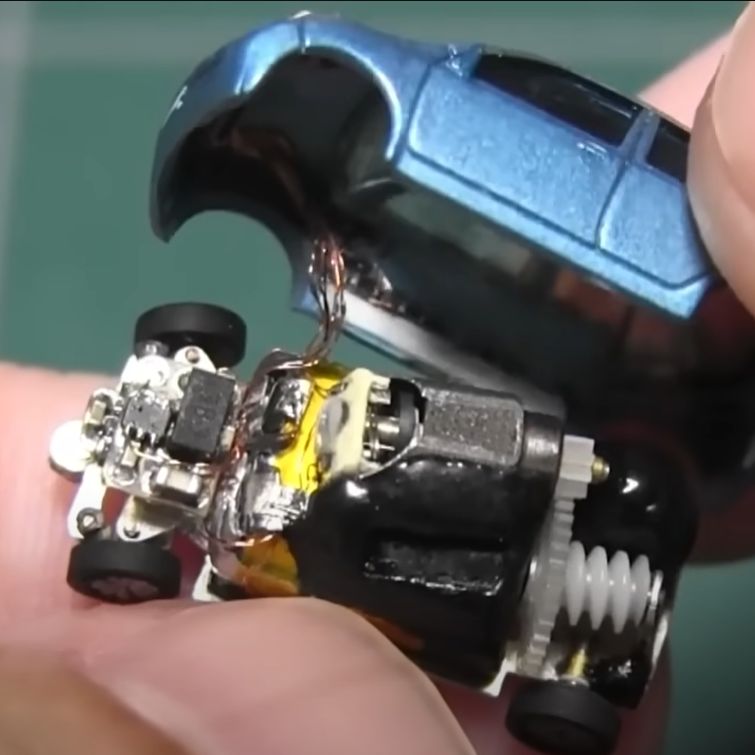



 The build starts with a Tomy 1:150 model Toyota Crown / Avalon. However, only the outer shell remain. From giving the wheels rubber tires and fabricating a delicate steering assembly, to adding motors for both locomotion and turning, the mechanical build is on point. But seeing the ATtiny1616 is deadbugged with a DRV8835 motor driver, with the SMD parts hooked up with magnet wire to save the most space possible is equally impressive. A PIC79603 IR module is used to receive the commands to drive the car.
The build starts with a Tomy 1:150 model Toyota Crown / Avalon. However, only the outer shell remain. From giving the wheels rubber tires and fabricating a delicate steering assembly, to adding motors for both locomotion and turning, the mechanical build is on point. But seeing the ATtiny1616 is deadbugged with a DRV8835 motor driver, with the SMD parts hooked up with magnet wire to save the most space possible is equally impressive. A PIC79603 IR module is used to receive the commands to drive the car.








