College engineering projects are great, because they afford budding engineers the opportunity to build interesting things without the need for financial motivation. Usually, some basic requirements are established, but students are free to get creative and build something that appeals to them personally. For our readers, mechatronics courses are ripe for these kinds of projects, as the field combines electrical engineering, mechanical engineering, and programming.
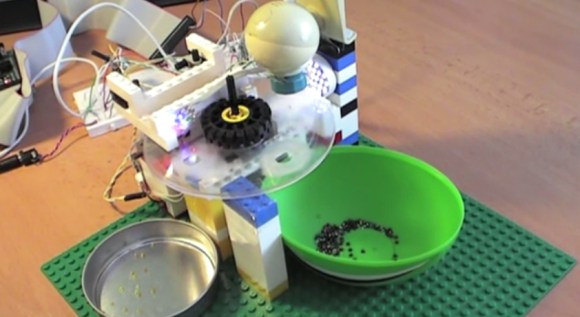
[Ethan Crane] is in just such a course, and had a final project due with only one real requirement: it had to use a PICAXE. Obviously, this gave [Ethan] quite a bit of freedom to build something unique, and what he came up with is an “Anti-Entropy Machine” designed to sort M&M candies by color. The electronics are as simple as [Ethan] could make them (a good philosophy for an engineering student to adhere to). There is an IR sensor to determine if a candy is in the hopper, an RGB sensor to determine its color, and servos to position the delivery chute based on color and operate the hopper.