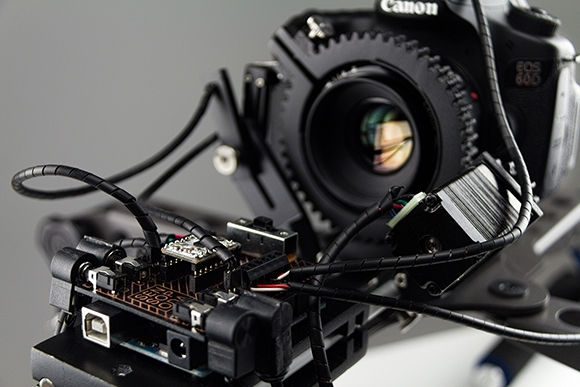
If you program using values that represent anything in the real world, you have probably at least heard of the Kalman filter. The filter allows you to take multiple value estimates and process them into a better estimate. For example, if you have a robot that has an idea of where it is via GPS, dead reckoning, and an optical system, Kalman filter can help you better estimate your true position even though all of those sources have some error or noise. As you might expect, a lot of math is involved, but [Pravesh] has an excellent intuitive treatment based around code that even has a collaborative Jupyter notebook for you to follow along.
We have always had an easier time following code than math, so we applaud these kinds of posts. Even if you want to dig into the math, having basic intuition about what the math means first makes it so much more approachable.