I studied physics in college, and I’m always surprised how fundamental some of the concepts are. Take waves for example. You really wouldn’t expect the same underlying concept to be at work on surface of a pond, the string of a guitar, light passing through two slits, and then in the probabilistic behavior of electrons orbiting inside nuclei. But here we are, in a world filled with wave-like phenomena.
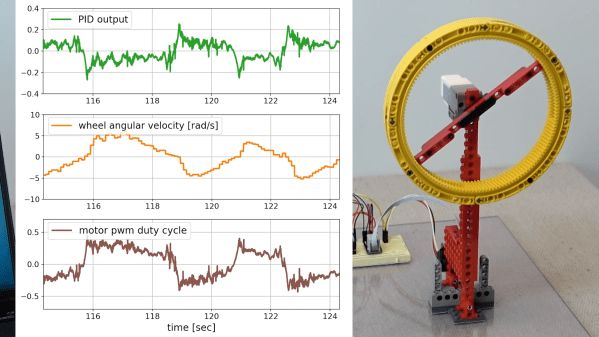
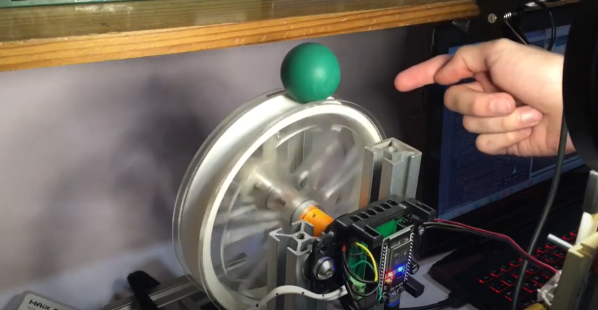
What little control theory I know, I’ve learned in the school of hard knocks. But it’s equally amazing that the same basic concepts govern the tuning of car shock absorbers, PID controllers, active audio filters, and other more complex systems where feedback matters. Crucial in all of these systems is the judicious balance of amplification and damping.
And last week on vacation, learning to drive a covered wagon pulled by a heavy draft horse, I saw the same patterns again. The horse likes to pull, and when the wagon comes over the crest of the top of a hill, it starts to roll forward into his harness, pushing him from behind. This makes the horse uneasy, and he slows down, the wagon pushes him harder, and positive feedback gets out of control.
The man who was teaching me to drive the wagon said, “it’s not like a car” in that you don’t tap the brakes to slow down and then let go. Rather, you hold on the brakes for a lot longer than you think is necessary – until the horse tells you that he feels like pulling again – and then you let up only a tiny bit at a time. Otherwise, you end up in the under-damped case, where you let the wagon go too much, it slows the horse, you slam the brakes, the horse pulls hard, and you let up on the brakes, and the cycle continues anew.
What he meant by “not like a car” was that the brakes aren’t just slowing down the wagon, they’re adding damping to keep the horse-wagon system from oscillating. Once that clicked in my mind, everything was smooth sailing. After a couple of days, I even started adding some feed-forward to my mental PID controller, letting the brakes go a little bit more when the horse was approaching the bottom of a hill, and he obviously wanted to pick up a little more speed before the grade ahead.
The horse seemed happy that I was finally getting it, but I don’t think he had any understanding of tuning PID loops. He did have me pondering, on a long stretch of rolling hills on a summer morning, if there were a good minimal set of patterns that explained a maximal breadth of phenomena. I’m starting with the physics of waves and the control of feedback systems, but what’s next?