Logging and telemetry in remote controlled racing is a great thing, and not only does [jwachlin]’s Open RC Spotter do a fantastic job of that, it has quite a few clever tricks up its sleeve that make it extra special.
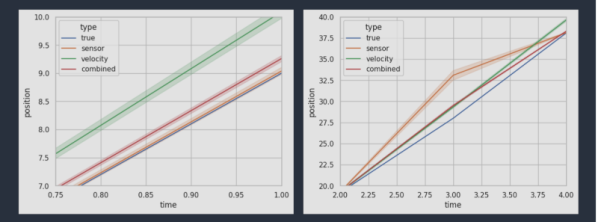
Open RC Spotter is an ESP32-based hardware platform for high performance RC car racing that reads from various sensors (including IMU, GPS, temperature, battery, and IR receiver for IR lap beacons) to create a filtered stream of readings that include position, velocity, lap time, battery voltage, and more.
This data gets logged to an SD card, but can also be broadcast wirelessly via ESP-NOW to a receiver that can in turn send it over serial USB, or do whatever else one wishes. There’s also a neat feature that fires up a temporary WiFi access point on demand so log files can be downloaded with a web browser, no need to hook up a cable.
So far, so cool. But there’s still another nifty feature. Open RC Spotter supports the Crew Chief telemetry protocol. Crew Chief is a piece of free Windows software that serves as a companion application for sim racing. It acts as a virtual race crew member, providing spoken information based on live telemetry read from supported racing sims.
Since Open RC Spotter supports the same telemetry format, one can use the virtual race engineer with RC car racing by simply feeding Open RC Spotter‘s serial data to the Crew Chief application. The RC telemetry data isn’t as rich as what comes from the racing sim APIs, but it’s more than enough to be useful.
People come up with all kinds of neat ideas when it comes to RC racing, and most of them depend on having access to good data. For example, a load cell in the steering mechanism can provides the data for force-feedback steering. We’ve even seen LiDAR and a depth camera used to automatically compute optimal racing lines.
 stylus. A consumer-grade (i.e. uncalibrated) webcam is all that is required on the hardware side. The software utilizes the familiar OpenCV stack to unroll the effects of the webcam
stylus. A consumer-grade (i.e. uncalibrated) webcam is all that is required on the hardware side. The software utilizes the familiar OpenCV stack to unroll the effects of the webcam