
We’re often asked what a simple way to add a display to a project is and we even hinted at this yesterday with the HMD comparison. The answer is: we’re not really sure. In the past, the go to was PSOne add on displays. They accept composite input which means you can painlessly attach almost any other consumer device with video out. The problem is they’re a little large. Then there’s the spy video car HMD. It’s black and white and accepts composite video too. It’s a little small though, which makes it difficult to work with outside of the original application. So, Hack-a-Day readers, what have you used as a simple palm sized portable display in your projects?
Day: June 8, 2008
Portrait Robot
[bre] passed along this portrait drawing robot from the same people that brought you the chief cook robot. Like the previous project, the portrait drawing bot emphasizes man machine interaction. The subject sits down and is asked for the quill. The robot captures the subject’s image and runs it through several processing steps. One set is to determine the contours and another is to determine the fill. The robot then draws the the contours and fills returning to the ink pot each time it reaches a trajectory threshold. Quill drawing can be quite hard for novice illustrators, but the robot’s smooth trajectory calculations prevent drips and stains.
Robofish > Real Fish
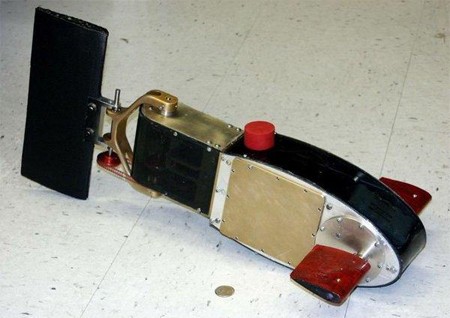
This is the kind of engineering that gets us excited, and not just because we like machines modeled on living things. Science Daily reports that Associate professor [Kristi Morgansen] from The University of Washington has developed these robofish for underwater data collection. Her technology is notable for two major reasons: the small robots use fins for locomotion instead of propellers, which reduces drag and creates greater maneuverability. The second and more important reason is that the robofish can communicate with each other via sonar, largely obviating the need for the robofish to surface for more instructions. Both design concepts were inspired by the shape and behavior of real fish. Currently the robots are only programmed to swim with or away from each other, but these are still prototypes and the technology looks promising. For more tech specs on these “Fin Actuated Autonomous Underwater Vehicles” (see why Robofish is better?), you can have a look at Morgansen’s notes.
DIY TomTom Docking Station

TomToms have been getting pretty cheap. We like ’em because they’re nice and hackable. This diy docking station was made from some etched PCBs, a bunch of male pin headers and a bit of hot glue.









