Everybody loves aquariums. There’s something soothing about watching the lil’ critters inside them swimming, crawling and wriggling about. But at the same time few people are up to the task of ensuring that said critters stay alive and happy in said aquarium. This is where small robots may be able to steal some fishy jobs, like a modern take on the gaudy fake aquariums of the 1990s. Cue [CPSDrone]’s mini-drone aquarium with mostly maintenance-free robotic fish.
These pose a few interesting engineering challenges, such as the replacing of feeding fish by having them scuttle back to their charging station like an aquatic Roomba, and giving them some level of intelligence to the point that they at least appear to be doing something fish-like.
Rather than give each robot fish full autonomy, they are instead controlled by a central system. This then raised the problem of radio frequency communication while underwater. The theory was that 433 MHz transceivers would still work for something the size of an aquarium before attenuation spoils things, which a quick test confirmed to be true.
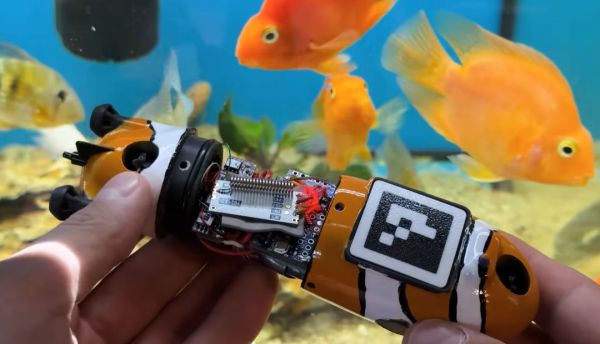
This enabled the construction of a small microcontroller-carrying submarine as a proof of concept before diving into the final version, involving resin 3D printed enclosures that are made water-tight using rubber O-ring seals and UV-cured resin. All that was left now was to add the big control system, which takes up much of the rest of the video.
Sadly they didn’t implement the boids algorithm, as this is pretty good at creating realistic life-like motion, as show with this demonstration by [Ben Eater]. This algorithm is pretty simple, with each ‘creature’ obeying rules on coherence, separation and alignment, creating a pattern that can be observed among schools of fish as well as flocks of birds. Due to its simplicity you could conceivably even omit the central control system and just give each ‘fish’ enough sensors to keep track of its buddies.
Continue reading “Engineering Micro-Submarines To Replace Fish”














