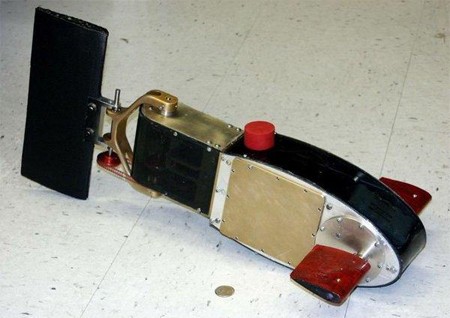
This is the kind of engineering that gets us excited, and not just because we like machines modeled on living things. Science Daily reports that Associate professor [Kristi Morgansen] from The University of Washington has developed these robofish for underwater data collection. Her technology is notable for two major reasons: the small robots use fins for locomotion instead of propellers, which reduces drag and creates greater maneuverability. The second and more important reason is that the robofish can communicate with each other via sonar, largely obviating the need for the robofish to surface for more instructions. Both design concepts were inspired by the shape and behavior of real fish. Currently the robots are only programmed to swim with or away from each other, but these are still prototypes and the technology looks promising. For more tech specs on these “Fin Actuated Autonomous Underwater Vehicles” (see why Robofish is better?), you can have a look at Morgansen’s notes.




5 thoughts on “Robofish > Real Fish”
Leave a Reply to loupCancel reply
Please be kind and respectful to help make the comments section excellent. (Comment Policy)










After everyone started complaining I don’t think I’ve seen a bad post on the site…
Good job.
Is there a video of these guys in action? I’de love to school a big fishtank full of them :P
Very cool. This is a good way to monitor ocean conditions.
acoustic modems are nothing new for auv/uuv communications.. but I’ve never seen anything of this (small) scale. Yay u-dub!
#4, check out the link labeled “Morgansen’s notes” There are a few videos of the fish in action there.