Water is kind of like information: both are a vital part of life and are found all around us. But not all water or information is healthy. Much of it may look harmless, but is actually polluted. A staggering number of people in the world have no access to fresh, clean water. ROVs can collect samples and detect pollution, but commercial types are way too expensive for the legions of people who need them.
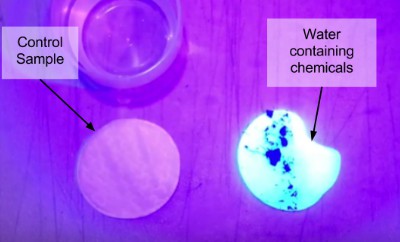
[allai5] wants to be the catalyst for change. She’s the president of Rogue Robotics, a group of high school students throughout central New Jersey who have pooled their talents to design and build a simple, open-source ROV that’s affordable, repeatable, and environmentally friendly. The team uses Volturnus ROV to collect water samples and UV light to determine the presence of a general type of pollutant known as optical brightening agents (OBAs). This is the stuff they add to laundry detergents and copy paper to whiten the fibers’ appearance. By design, OBAs fluoresce brightly under UV light. After soaking a cotton pad in water sample, it’s easy to see if OBAs are present.
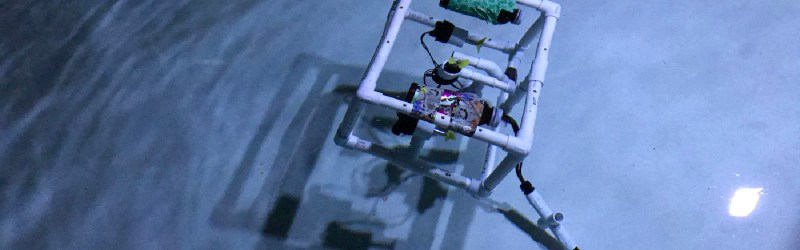
At 12″ x 12″ x 18″, Volturnus ROV is compact enough to explore most of the nooks and crannies of any body of water. It moves under the power of three thrusters—500 GPH bilge pump motors driven by a pair of L298N controllers—and is controlled by an Arduino Mega using a wireless joystick. The driver of the ROV navigates the drink through the eyes of a waterproof car back-up camera whose feed is flipped with a Python script.
Volturnus ROV is not a one-stop solution for dealing with marine pollution. The team would like to add filtration in the future and move the electronics to the bottom so it can go faster. Rogue Robotics’ aim has always been to make an ROV that does a few things well. Right now, it’s an excellent jumping-off point for awareness and blueprint for action. Find your inspiration after the break.

















Interesting, although I find it a bit strange to put all the electronics shore-side. It is true you save some money on integration and waterproofing, but you easily loose that again in increased tether costs (more wires, and for higher current).
The ROV was designed relatively low-powered applications for up to 30 ft of range, and the voltage drop is minimal – it would actually have been much more costly to implement a waterproof case on the ROV, and then also have to deal with issues that emerge such as communication (RS-232, RS-485, etc). In the future, we hope to expand the functionality of the ROV though, and will probably move towards some form of low-cost, underwater waterproof enclosure for the ROV electronics.