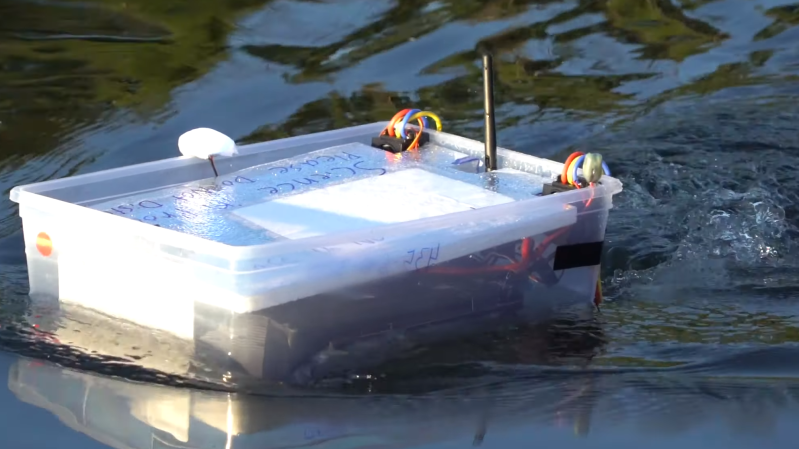
There’s nothing quite like the sight of a plastic box merrily sailing its way around a lake to symbolise how easy it is to get started in autonomous robotics. This isn’t a project we’re writing about because of technical excellence, but purely because watching an autonomous plastic box navigate a lake by itself is surprisingly compelling viewing. The reason that [rctestflight] built the vessel was to test out the capabilities of ArduRover. ArduRover is, of course, a flavour of the extremely popular open source ArduPilot, and in this case is running on a Pixhawk.

The hardware itself is deliberately as simple as possible: two small motors with RC car ESCs, a GPS, some power management and a telemetry module are all it takes. The telemetry module allows the course/mission to be updated on the fly, as well as sending diagnostic data back home. Initially, this setup performed poorly; low GPS accuracy combined with a high frequency control loop piloting a device with little inertia lead to a very erratic path. But after applying some filtering to the GPS this improved significantly.
Despite the simplicity of the setup, it wasn’t immune to flaws. Seaweed in the prop was a cause of some stressful viewing, not to mention the lack of power required to sail against the wind. After these problems caused the boat to drift off course past a nearby pontoon, public sightings ranged from an illegal police drone to a dog with lights on its head.
If you want to use your autonomous boat for other purposes than scaring the public, we’ve written about vessels that have been used to map the depth of the sea bed, track aircraft, and even cross the Atlantic.













Learned from a firm doing bigger commercial autonomous marine vessels that the proper name for these is *roboats* . :-D
At what point do they become “droidnaught”?
At what point does it become a “droidnaught”?
When they exceed 1000 feet in length and are bristling with 16″ guns.
https://www.theonion.com/i-rowboat-1819583491
This is awesome, yet simple. There are so many cool and simple things can be built, i have always entangled myself with overly complicated thought of less complicated ideas.
Well, compared to mine, it does not fly ;_)
https://der-frickler.net/modellbau/planes/lockkopter
GPS reflection from the water surface might be a problem. Limiting reception by blocking the sides might be worth a try.
Amazing! But where are the build instructions? Obviously where I am based the closest body of water big enough to host it, is in fact the classic model boat basin in Central Park. But it be interesting to see the faces of the sailing boat folk as the rig drove itself all over the basin.
You would probably be fine with that as long as you have a R/C override you can clearly demonstarate.
And demonstrate what? Oh and I was thinking of working out how to have a Prop do that all instead of what sort of device the Ardu-whatever runs.
Yikes, I get the idea was to do things as cheaply/easily as possible, but that big square “bow” is about the least hydrodynamic shape possible. Probably why it does that little shimmy, it can’t track a straight line to save its life.
Meanwhile, I definitely want to get a sign for the door that says “Science in Progress. Please Do Not Disturb”
Boats are boat shaped because…….boat.
“Barging” through the water is as rude as it is anywhere else.
ArduRover supports SailBoat’s too, http://ardupilot.org/rover/docs/sailboat-home.html
https://www.youtube.com/watch?v=zoNLZ-xE-_0
As a group of RC aircraft enthusiasts, we were flying RC Planes with pontoons off the water, hence we also became interested in RC Boats to attempt recovering them from the inevitable engine-out and dunked-on-landing conditions. Hulls that ranked high for functionality, reliability, long life and ease of build were typically closed cell Styrofoam carved to shape and then coated with epoxy or epoxy-glass. One that was quite successful and simple was just a child’s Styrofoam pool paddleboad simply sealed with epoxy paint.
As articles concerning ocean-going robotics projects have been presented by HAD I’ve often thought a closed cell foam self-righting hull design covered with epoxy glass would be perfect for any model up to and including an autonomous ocean-going project.
Any shape can be accommodated.
This is how essentially all of the prototype level ocean-going robot boats I am familiar with have been built.