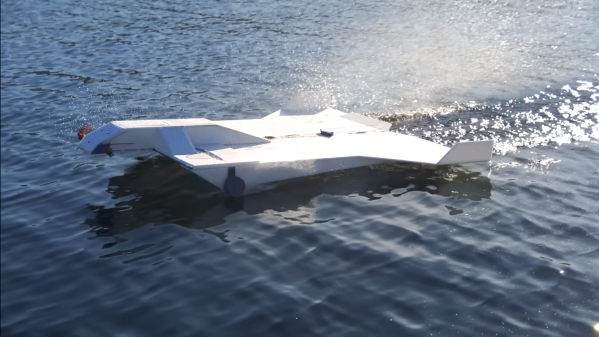
If there’s one thing [rctestflight] likes, it’s… probably radio controlled test flights. If there are two things [rctestflights] likes, the second one is probably ground-effect vehicles, AKA Ekranoplans. Tired of having them flip over and crash, he’s trying an an innovative solution: stick a planing hull on it.
Ekranoplans have a stability problem because the center-of-pressure isn’t static: as the wing gets closer to the ground, the high pressure cushion of air that creates the ground effect tends to put more lift rearwards. The net effect of that is to torque the vehicle nose-down, which is kind of a self-limiting problem at a fraction of a wingspan’s altitude. The opposite problem is more concerning: the higher the ekranoplan gets, the more it wants to nose up, and there’s nothing to stop it. That leads to the vehicle flipping over. Continue reading “What Do You Call An Ekranoplan With An Outboard Motor?”→
Hydrofoils have been around for several decades, but watching a craft slice through the water with almost no wake never get old. In the videos after the break, [rctestflight] showcases his ambitious project: transforming a standup paddleboard into a rideable hydrofoil with active stabilization.
Unlike conventional electric hydrofoil boards that depend on rider skill for balance, [rctestflight] aims to create a self-stabilizing system. He began by designing a small-scale model, complete with servo-controlled ailerons and elevators, dual motors for differential thrust, and a dRehmFlight flight controller. A pair of sonar sensors help the flight controller maintain constant height above the water. The wings are completely 3D printed, with integrated hinges for flight control surfaces slots for wiring and control components. It’s better suited for 3D printing than RC aircraft since it’s significantly less sensitive to weight, allowing for more structural reinforcement. The small scale tests were very successful and allowed [rctestflight] to determine that he didn’t need the vertical stabilizer and rudder.
The full-sized version features a scaled up wing, larger servos and motors attached to an 11-foot standup paddleboard — minus its rear end — mounted on commercially available e-foil booms. A foam battery box stores a hefty LiFePO4 battery, while the electronics from the smaller version are repurposed here. Despite only catching glimpses of this larger setup in action at the end of the video, it promises an excitingly smooth lake ride we would certainly like to experience.
We’ve seen several 3D printed hydrofoils around here, but this promised to be the largest successful attempt. Don’t fail us [Daniel].
Who said paddle wheels were just for leisurely riverboat cruises? [rctestflight] is smashing that image with a high-speed twist on the concept, using paddle wheels to propel a ground effect vehicle across water. In the video after the break, witness this blend of old and new as he tests various designs.
Over the past few years he’s worked on a series of ground effect vehicles which exploits the increased lift and reduced drag when flying close to a surface. Unlike full-sized counterparts, smaller RC models struggle to stay in this sweet spot due to less pronounced self-stabilizing feedback loops. This means a small scale vehicle tends to touch the water rather often, and bleeding a lot of momentum in the process.
He wanted to convert these losses into gains by giving the vehicles a boost of speed whenever it touches the water. It’s a popular trick with RC cars which will hydroplane for long distances as long as they can maintain speed. All the designs still required air propellers for takeoff and to help maintain speed. The final design didn’t really need the paddle wheel when the air and water was calm, but it definitely helped when things got choppy. He is already experimenting with different paddle designs but also plans to test some other types of surface drives.
The toroidal boat propeller pair installed. (Credit: rctestflight)
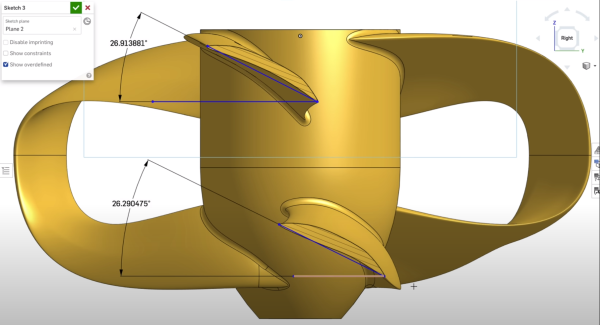
As boring as propeller designs may seem to the average person, occasionally there’s a bit of a dust-up in the media about a ‘new’ design that promises at least a few percent improvement in performance, decreased noise profile, or any combination of such claims. Naturally, if you’re [Daniel Riley] of RCTestFlight, then you have to 3D print a few of them, and make a video covering a handful. Most famous of these is probably the toroidal propeller that made waves a while ago, mostly in the field of flying drones, but commercial toroidal boat props exist too.
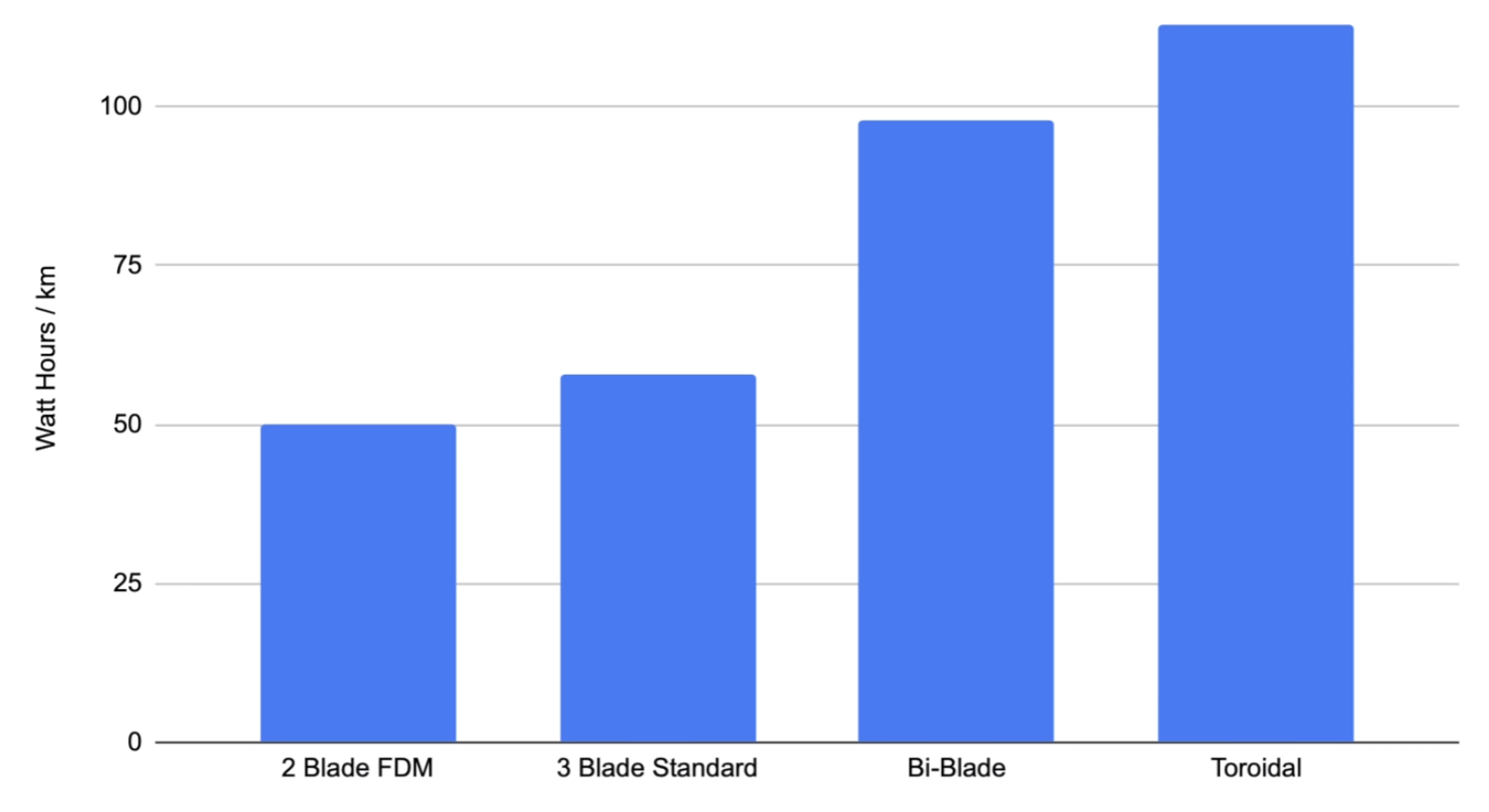
Test results of the different boat propeller designs. (Credit: rctestflight)
Interestingly, the 2-blade FDM-printed propeller ended up performing the best, while the bi-blade design (with two sets of blades positioned one after the other) performed worse — but better than the toroidal design. Here the last two designs were professionally printed in nylon, rather than printed at home in a standard FDM printer with all of the surface sanding and treatment required. Even so, the surface treatment did not seem to noticeably affect the results in further testing.
Hints at the root cause of the problem came from the bubble tests. In a bubble test, air is blown in front of the spinning propeller to visualize the flow of the water. This revealed some stalling on the bi-blade and the toroidal design too, which would explain some of the performance loss. Going back between the CAD model and the design in the patent by Sharrow Marine didn’t provide any obvious hints.
Considering that this latter company claims a performance uplift over regular boat propellers, the next steps for [Daniel] would appear to involve some careful navigating between fluid dynamic modeling and claims made in glossy marketing material to figure out exactly how close someone at home with a 3D printer and some spare time can get to those claimed numbers.
(Heading image: The toroidal propeller’s details in the CAD software. (Credit: rctestflight) )
Ground effect vehicles, or ekranoplans, have the advantage of being more efficient than normal aircraft and faster than boats, but so far haven’t been developed beyond experimental prototypes. Fortunately, this doesn’t stop companies from trying, which has led to a collaboration between [ThinkFlight] and [rctestflight] to create a small-scale demonstrator for the Flying Ship Company.
The Flying Ship Company wants to use unmanned electric ekranoplans as high-speed marine cargo carriers that can use existing maritime infrastructure for loading and unloading. For the scale model, [rctestflight] was responsible for the electronics and software, while [ThinkFlight] built the airframe. As with his previous ekranoplan build, [ThinkFlight] designed it in XFLR5, cut the parts from foam using a CNC hot wire cutter (which we still want a better look at), and laminated it with Kevlar for strength. One of the challenges of ground effect vehicles is that the center of pressure will shift rearward as they leave a ground effect, causing them to pitch up. To maintain control when moving into and out of ground effect, these crafts often use a large horizontal stabilizer high up on the tail, out of ground effect.
A major feature of this demonstrator is automatic altitude control using a LIDAR sensor mounted on the bottom. This was developed by [rctestflight] using a simple foam board ekranoplan and [Think Flighs]’s previous airframe, with some custom code added to ArduPilot. It works very well on smooth, calm water, but waves introduce a lot of noise into the LIDAR data. It looks like they were able to overcome this challenge, and completed several successful test flights in calm and rough conditions.
The final product looks good, flies smoothly, and is easy to control since the pilot doesn’t need to worry about pitch or throttle control. It remains to be seen if The Flying Boat will overcome the challenges required to turn it into a successful commercial craft, and we will be following the project closely.
[rctestflight] has built several autonomous boats, and with missions becoming longer and more challenging, he bought an inflatable kayak to serve as a dedicated rescue vessel. Instead of relying on outdated manual paddling, he built an autonomous solar-powered tugboat.
♪ “Rum, treasure, ArduRover, Pixhawk 4 and so much solar, break of dawn till the day is over, the ship will surely go…” ♪
The tugboat uses a pair of molded fiberglass hulls in a catamaran configuration. The wide platform allows a pair of 100W solar panels to be mounted on top. It was [rctestflight]’s first time molding anything out of fiberglass, so there was quite a bit of trial and error going on. The mold was 3D printed in sections, aligned with dowel pins, and glued together. After the epoxy had cured, the mold halves could be split apart for easier removal of the hull.
As with most of [rctestflights] autonomous vehicles, control is handled by a Pixhawk 4 running ArduPilot/ArduRover. A pair of 76 mm brass propellers powered by brushless motors provide propulsion and differential steering. The motors get power from six LiFePO4 batteries, which charge from the solar panels via MPPT charge controllers. The hulls are covered with plywood decks with removable hatches and inspection windows. After a bit of tuning, he took the boat for a few test runs, the longest being 5.1 km with himself in tow in the kayak. At less than 5 km/h (3 mph) it’s no speedboat, but certainly looks like a relaxing ride. Many of [rctestflight]’s previous vessels were airboats to avoid getting underwater propellers tangled in weeds. It was less of an issue this time since he could just haul the tugboat close to the kayak and clear the propellers.
[rctestflights] are always entertaining and educational to watch, and this one certainly sets the standard for sea-shanty soundtracks at 13:32 in part two.
Scope creep is a real pain in the real world, but for projects of passion it can have some interesting consequences. [rctestflight] was playing around with 3D printed rover gearboxes, which morphed into a 3D printed tank build.
[rctestflight]’s previous autonomous rover project had problems with the cheap geared motors, and he started experimenting with his own gearbox designs to use with lower RPM / Kv brushless drone motors. The tank came about because he wanted a simple vehicle to test his design. “Simple” went out the window pretty quickly and the final product was completely 3D printed except for the fasteners, axles, bearings, and electronics.
The tracks and gears are noisy, but it works quite well. On outdoor tests [rctestflight] did find that the tracks were prone to hooking on vines and branches, which in one case caused it to throw a track after the aluminium shaft bent. An Ardurover navigation system was added and with a 32 Ah battery was able to run autonomously for an entire day and there was surprisingly little wear on 3D printed gearbox and tracks afterward. All the STL files are up on Thingiverse, but [rctestflight] recommends waiting for an upcoming update because he discovered flaws in the design after filming the video after the break.