Walking robots have a rich history both on and off the storied pages of Hackaday, but if you will pardon the expression, theirs is not a field that’s standing still. It’s always pleasing to see new approaches to old problems, and the Landbeest built by [Dejan Ristic] is a great example.
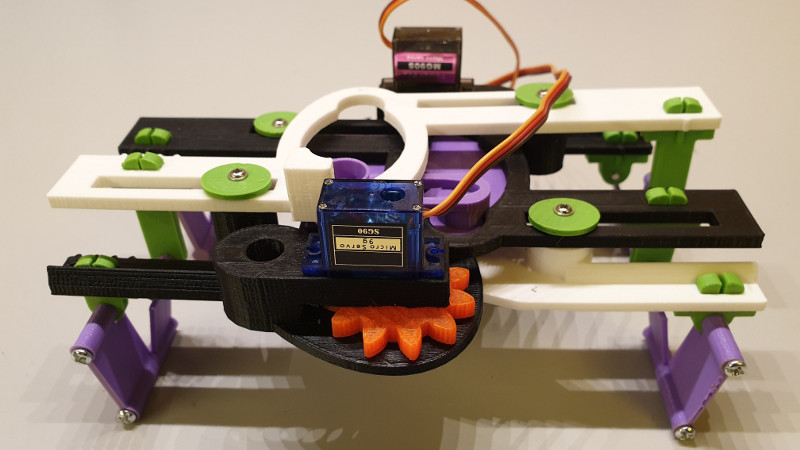
It’s a four-legged walker with a gait dictated by a cam-and-follower mechanism that allows it to perform the full range of leg movement with only one motor. Each cam can control more than one leg in synchronisation, and in his most recent prototype, there are two such mechanisms that work on opposite corners of a four-legged machine. The legs are arranged in such a way that the two corner-to-corner pairs pivot at their centres in a similar manner to a pair of scissors; allowing a servo to steer the robot as it walks.
The result certainly isn’t as graceful as [Theo Janssen]’s Strandbeest, from which it evidently takes inspiration for its name, but it’s no less capable for it. After the break you can see a video he’s posted which clearly illustrates its operation and demonstrates its ability to traverse obstacles.
The only thing that’s missing are the files and software should you wish to create your own. He’s unapologetic about this, pointing out that he’d prefer to wait until he is satisfied with it before letting it go. Since he’s put a lot of work in so far and shows no sign of stopping, we’re sure he’ll reach that point soon enough.

















I see two servos there, maybe I can’t count.
One servo does the walking, the other ‘shifts gears’ to change the walking motion into turning motion,
All the single robots, all the single robots
https://www.youtube.com/watch?v=4m1EFMoRFvY
and they kinda’ have the same moves.
:o)
I was wondering about the mechanism that they were using to make it move like that with a single servo. Guess it might be possible to make the gear shifting at the limits of a single servo and the walking/turning in the majority of the range.
Well, technically it looks like only one is acting as a servo, and the other is just a motor with no servo feedback (it was hacked for continuous rotation).
Awww yiss, nice and whirry in a menacing fashion, just need to glue a turkey basting syringe on top and you’re all set to be propmaster on a remake of “Runaway” https://youtu.be/GzWhHC2bL5c
Actually <3 that film, amusingly hokey in parts, but also some elements are scary accurate.
Bullets that can change direction after being fired. I want to see someone build a working model of that triangular ducted fan drone. Some systems that could work have been mentioned on HaD. I think the best would be the one with stacked counter-rotating props with the upper one using blades with angled hinges and torque variation to make the hinges bend at varying angles at different points in rotation in order to control the flight direction.
It’s funny, that drone seemed one of the most unbelievable technologies in that to me in the 80s. I was thinking like “Yeah sure, maybe a monster of a rewound Mabuchi 540 would keep it in the air, with a power wire, but what about the 6 D Cells you’d need to keep it airborne more than 60 seconds???”
I still enjoy it. Lots of hollywood magic. I dont think a single one of the Hexapods actually could walk. First time i saw Re-etched CD4011 to kill all humans. made by TI. CMOS is evil in itself. stick to nice safe LS-TTL.
The action (gait?) is not symmetrical. The robot dips every other stride. I can not tell if this is (1) an alignment
error, (2) simplifies the mechanics or (3) compromises the efficiency of the robot. Maybe a combination of the three.
Well I’d call it a feature since the mechanical design relies on that behaviour. But it’s really (2) and (3) both. For sure not the best design for efficient battery use.
That’s hard to watch with the multi-shadow from multi-specular light source.
hmm, maybe you should hang out at a photo/video site rather than a hacking site? guy shows awesome mechanical build, gets complaints about lightning quality in video.. seriously?
Well, at first, it was tough for me to tell if it was actually moving in any direction. A simple pattern on the walking surface would have given a cue.