Rope-climbing robots are the stuff of engineering dreams. As kids, didn’t we all clutter our family home with constructions of towers and strings – Meccano, or Lego – to have ziplines spanning entire rooms? Good for the youngsters of today, this has been included in school curricula. At the University of Illinois, the ME 370 students have been given the task of building a robot that can hang from a rope and walk across it—without damaging the rope. The final projects show not only how to approach tricky design problems, but also the creative solutions they stumbled upon.
Imagine a tiny, rope-climbing walker in your workshop—what could you create?
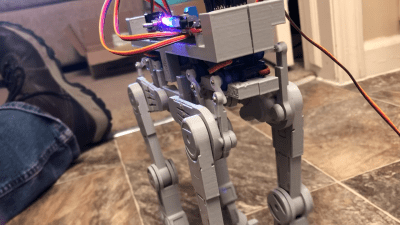
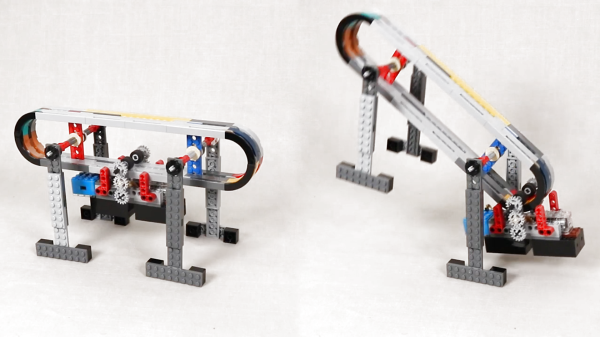
The project is full of opportunities for those thinking out of the box. It’s all about the balance between innovation and practicality: the students have to come up with a solution that can move at least 2 meters per minute, fits in a shoebox, and has some creative flair—no wheels allowed! The constraints provide an extra layer of challenge, but that’s where the fun lies. Some students use inverted walkers, others take on a more creature-like approach. The clever use of motors and batteries shows just how far simple tech can go when combined with a bit of engineering magic.
This project is a fantastic reminder that even small, seemingly simple design challenges can lead to fascinating creations. It invites us adults to play, and by that, we learn: a win-win situation. You can find the original article here, or grab some popcorn and watch the video below.
Continue reading “Crawler Challenge: Building Rope-Traversing Robots”