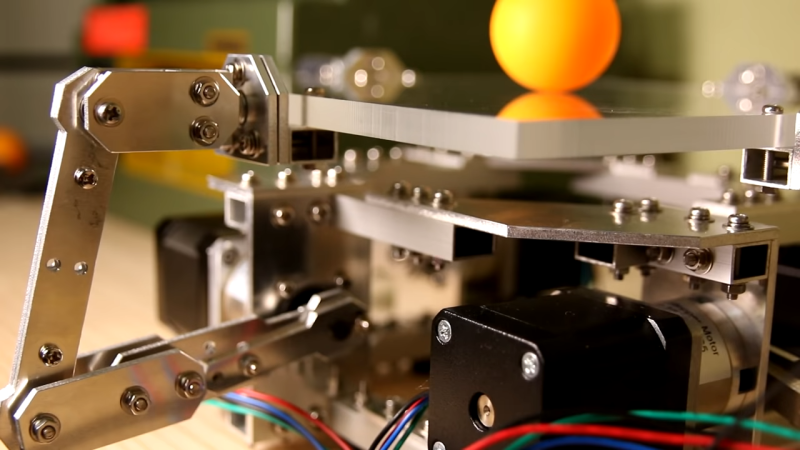
When we first caught a glimpse of this ball juggling platform, we were instantly hooked by its appearance. With its machined metal linkages and clear polycarbonate platform, its got an irresistibly industrial look. But as fetching as it may appear, it’s even cooler in action.
You may recognize the name [T-Kuhn] as well as sense the roots of the “Octo-Bouncer” from his previous juggling robot. That earlier version was especially impressive because it used microphones to listen to the pings and pongs of the ball bouncing off the platform and determine its location. This version went the optical feedback route, using a camera mounted under the platform to track the ball using OpenCV on a Windows machine. The platform linkages are made from 150 pieces of CNC’d aluminum, with each arm powered by a NEMA 17 stepper with a planetary gearbox. Motion control is via a Teensy, chosen for its blazing-fast clock speed which makes for smoother acceleration and deceleration profiles. Watch it in action from multiple angles in the video below.
Hats off to [T-Kuhn] for an excellent build and a mesmerizing device to watch. Both his jugglers do an excellent job of keeping the ball under control; his robotic ball-flinger is designed to throw the ball to the same spot every time.














Is it possible to keep de ball at the same height always?
With PID control loops, many things are possible :) bet it could be done. One hard part might be the degree of precision possible when sensing the ball altitude via optical imaging from beneath, as a rather minor reduction in apparent radius might translate to a much greater increase in height. But then again, it probably has to detect altitude fairly well already in order to know when it’ll impact the bumper, so maybe not. Who knows, maybe the machine is already capable of it and they simply didn’t demo that feature in this video.
I’ve found if you leave the ball on a flat surface, pressed against objects so it does not roll. It stays at the same height with very little effort. ;)
Wow. Very nice. Does it really need a $120 camera?
Unlikely, I’d say anything you can get 1000 pixels and 30 fps out of.
Ha. I’d place my bet on that camera already lying around in a bin somewhere, and is going to be cannibalized and re-purposed again at some point. It’s happened to me :) I have a few shamefully pricey bits and bobs sitting around somehow unused… they gradually accumulate through my journeys and projects. Some of ’em were weird scores for free or else pennies on the dollar, so I got them without a plan. Some of them had a plan that fell through and are waiting for a new plan. I do end up using them eventually. It’s not a great habit, but it does happen as the years go by.
Very cool. The entertainment begins with some warm-up stretches and then proceeds to dazzle and delight.
Right? The “warm-up stretching” is very cute. Not sure if that’s the intent, but I like it. Nice touch.
Can it do multiple balls? i.e juggle
A Leap Motion can do 200fps capture in 3D I should imagine it would be pretty good at doing this. But then again you could have a laptop touch pad on the bouncing surface and do some math or even so IR sensors in each cormer if your math is really good.
Yah if you stuck it in a black box and had total control of illumination, you could do it with 4 light sensors that have good sensitivity and responsiveness. I think you’d need something like 32 of them to do it in typical indoor lighting though.
Nice, but over it’s constrained. Three steppers should be enough. Can’t wait to see 3 balls with real juggling!
It simplifies the maths and allows for a symmetrical layout on this square glass pane and frame. Steppers aren’t that expensive too. As a bonus the precision and maximum force increases a bit.
do it with cube or other shapes
Math involved in the modeling should be beautiful as well!
Fantastic, I want one on my desktop !
with a joystick and a pedal to control it’s bouncing when talking to some people ;^P
Beer pong in the engineering wing just got interesting.
I am curious about the maximum height you could drive the balls to
I’d be interested in seeing if you could anticipate the ball hitting the glass, so that you could be lowering it in order to “catch” the ball, rather than just letting the bouncing decay.
Is there a report for this?