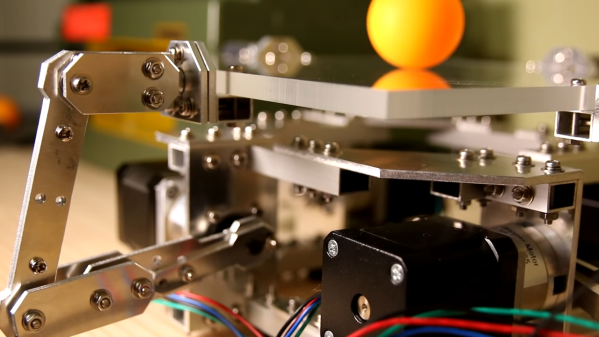
When we first caught a glimpse of this ball juggling platform, we were instantly hooked by its appearance. With its machined metal linkages and clear polycarbonate platform, its got an irresistibly industrial look. But as fetching as it may appear, it’s even cooler in action.
You may recognize the name [T-Kuhn] as well as sense the roots of the “Octo-Bouncer” from his previous juggling robot. That earlier version was especially impressive because it used microphones to listen to the pings and pongs of the ball bouncing off the platform and determine its location. This version went the optical feedback route, using a camera mounted under the platform to track the ball using OpenCV on a Windows machine. The platform linkages are made from 150 pieces of CNC’d aluminum, with each arm powered by a NEMA 17 stepper with a planetary gearbox. Motion control is via a Teensy, chosen for its blazing-fast clock speed which makes for smoother acceleration and deceleration profiles. Watch it in action from multiple angles in the video below.
Hats off to [T-Kuhn] for an excellent build and a mesmerizing device to watch. Both his jugglers do an excellent job of keeping the ball under control; his robotic ball-flinger is designed to throw the ball to the same spot every time.
Continue reading “Robotic Ball Bouncer Uses Machine Vision To Stay On Target”
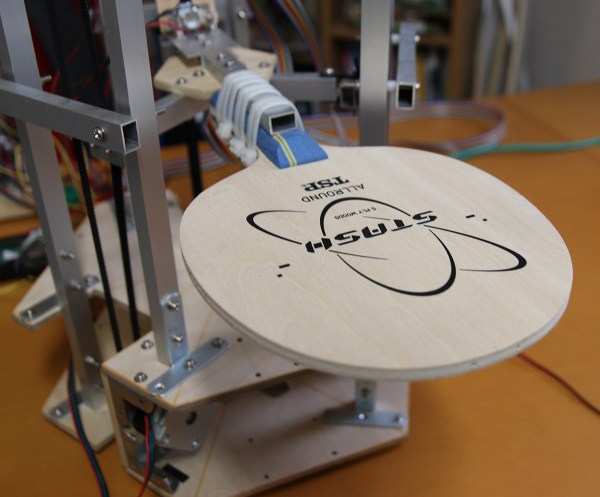





 While the original plan was to build a low-cost version that could juggle balls by throwing them up in the air, this proved to be very difficult. Instead of giving up, [Nathan] simplified the problem by rolling the balls up a ramp. The entire build
While the original plan was to build a low-cost version that could juggle balls by throwing them up in the air, this proved to be very difficult. Instead of giving up, [Nathan] simplified the problem by rolling the balls up a ramp. The entire build